
机械专业外文文献翻译-外文翻译--夹具装置的多目标优化设计
18页
1、 外文资料名称:Multi-objective optimal fixture layout design 外文资料出处:Robotics and Computer Integrated Manufacturing 附 件: 1。外文资料翻译全文 2。外文原文 指导教师评语: 签名: 年 月 日夹具装置的多目标优化设计Diana M. Pelinescu, Michael Yu Wang*陈少卫译摘要: 本文重点阐述了夹具布局设计,主要用于多种质量标准下确定和评价夹具设计的可用性,并利用近似交换法结合多种性能要求进行夹具优化设计。重要的性能参数与运动定位的基本要求和封闭形式下的总体定位。三个性能参数为工件定位精确度、基准和定位接触力的分布。本文着重利用分级递进的方法进行多基准优化设计。引入多种有效的算法并推广应用到各种实际案例,形成了执行夹具组合的适当交换方法。举例说明了上述方法的实验观察和实验效果。关键词:夹具;夹具布局;夹具组合;多目标优化设计1. 引言在产品加工精度和装配精度方面,适当的夹具设计是保证产品质量的关键。夹具系统通常由夹紧和定位组成,必须能够通过及其操作执行定位并夹紧
2、工件。虽然出现了一些像3-2-1规则设计指南,但基于CAD模型的自动夹具设计系统一直发展缓慢。本文论述了一类三维工件夹具的自动设计方法。被夹紧工件是一个任意复杂的几何体,夹具有最小数量的限位元素,即六个定位和一个夹紧。而且, 夹具要素被看作是非摩擦接触点接触,并限定于在具体的特定的定位。一般来说,一套有效的夹具可假设为一个大的收集装置。例如,定位点可能产生于离散工件的表面。夹具设计的要求首先是确定可行夹具结构,满足定位和闭合的要求。其次, 该夹具设计需基于一些评价标准和最优(或次优)夹具的选择。这表现为定位精度、规范和分散定位力。这些要求包括了夹具设计的关键技术。这些多重要求可能会冲突。因此,必须进行多目标夹具设计。文中给出的是一种优化夹具的设计方法。该方法是基于理论的最佳实验设计。 研制了一种高效评价受力递归特性的方法,自己设计开发了受力分析软件。优化算法夹具设计制作了一套适应多种性能要求的算法。2.相关工作 参考文献1是普通夹具技术。多年来对夹具有了一个基本要求,近年来已广泛应用于自动化领域。有几种基于螺旋理论来分析夹具性能,来解决诸如封闭运动学,接触类型和摩擦效应。参考文献7是基
3、于不同的几何分析技术。除了封闭运动学,组合夹具自动设计程序是基于这一方法开发的。近来固定模块化设计问题得到更多的关注。有深入研究夹具设计、围绕工件和坚固的夹具结构,可行的刀具和路径间隙。综合研究夹具问题,已大致集中在夹具组成上,尤其在自动化方面的应用。参考文献14描述的是夹具设计技术。3. 夹具模型 夹具的基本性能在于被夹紧的运动约束。其运动条件是清楚的。如一个夹具有n个定位点,(i=1,2,n),夹具可表示为:由和确定了定位位置和工件定位。夹具设计由定位矩阵来定义,当和,表面标准和工件表面接触点的位置。夹具设计需要一个综合计划,以满足一定的装夹性能要求。4. 夹具的质量性能规范4.1 精确定位夹具质量的一个重要方面就是工件定位在夹具上的精度要高。一般工件的位置误差由几何变形和定位误差造成的。本文只讨论定位误差造成的误差。作为一种夹具模型的扩展(公式(1),定位误差和工件定位误差可表示如下: (2)显然, 误差来源于定位基准的工件定位精度。定位误差可表示为系统矩阵或是信息矩阵,M=GGT。实验表明,一个确定的标准达到高定位精度是信息矩阵的最大决定因素(D-optimality)等等,最
4、大值(即M)。4.2最小定位力夹具设计的另一个要求是尽量减少定位接触力和任何约束或闭合力。让我们讨论一下完全确定的位置矢量和单元表面。对于点接触,广义的工件夹紧力可表示为: (3)表示夹紧力的大小。因此,定位接触力可表示为 (4)我们可得出这些力的夹紧强度: 当 (5)在闭合情况下,需要将这些力定位于N个定位点中的每个定位点: 计算平均定位接触力为: (6)得出一个适当的设计值(Pc)。这表明,在优化设计过程中,应该明确定位点和夹紧定位。4.3平衡定位接触力夹具设计的另一个重要问题是对工件的总应力应尽可能均匀分布在定位处。在夹紧过程中,若P表示反应力,那么我们可以确定分散定位接触力 (7)因此,最小化目标是确定均衡分散力,最小值(d)。5. 优化夹具设计与交换算法如前所述,在工件表面产生一系列不连续的拾取点,我们可以为夹具生成可能存在的拾取点。例如,使用CAD模型的工件, 离散的单元平均矢量,可以产生均匀的表面,尽量为夹具零件组件,如图1。在夹具布局设计中, 从夹具定位的性能要求中,选择最佳拾取点,以及闭合运动条件。通过若干个拾取点,选择一套合适的定位和夹紧,是一项复杂的工作。参考文献
《机械专业外文文献翻译-外文翻译--夹具装置的多目标优化设计》由会员ni****g分享,可在线阅读,更多相关《机械专业外文文献翻译-外文翻译--夹具装置的多目标优化设计》请在金锄头文库上搜索。
2023年广州市房屋租赁合同范本简易.doc

行测总结笔记-学霸笔记-必过
环境保护与绿色化学
幂的运算经典难题
小数加减乘除法口算练习题
企业用电管理系统设计
2023年译林小学英语5AUnit8-At-Christams知识点与练习
优异语文老师讲话稿
学第一学期人教版九年级英语期中检测试题带答案名师制作优质教学资料

护理部实习工作总结
国培研修心得体会通用15篇
一件有趣的事高一作文700字
新教材北师大版八年级数学下册不等式与方程讲义
医药行业-技术发展部-包装检验员岗位说明书
临汾物业管理设备项目实施方案
街道经济发展局上半年工作总结
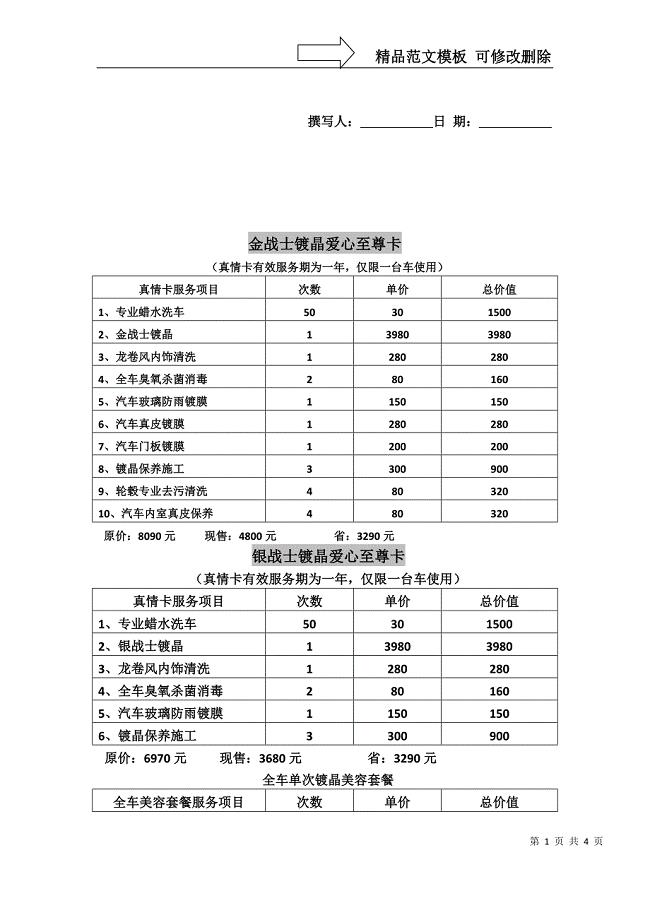
汽车美容活动方案
有机合成新策略

护士岗位求职简历模板

工程部门年终工作总结模板(4篇).doc
 【整合汇编】品德与生活教学工作计划
【整合汇编】品德与生活教学工作计划
2023-03-24 52页
2023年医院护士演讲稿汇总8篇
2024-01-10 21页
2023年大学生法学实习报告十篇
2023-05-29 41页
湘美版小学美术三年级下册《六面怪脸》教学设计
2023-01-04 5页
蓄洪区安全建设庄台护坡施工组织设计
2023-08-09 64页
关于会计述职10篇
2024-01-02 30页
2023年有关大学生自我介绍模板汇编8篇
2024-01-04 13页
2023年消毒供应中心季度工作计划5篇
2023-01-02 14页
2022暑假社会实践心得体会十篇(精选汇编)
2023-10-14 33页
504650665毕业设计(论文)基于单片机的教室人数实时监控模块的设计
2022-11-14 49页