
课程设计包装机推包机构运动简图与传动系统设计资料
16页
1、机械原理课程设计说明书 设计题目:包装机推包机构运动简图与传动系统设计学院:机电学院专业:机械工程及其自动化姓名:学号:小组成员:指导老师: 目 录一、设计题目2二、功能分解3三、运动转换3四、执行机构的选择与比较3五、原动机的选择5六、运动方案的拟定6七、传动机构8八、运动示意图10九、运动循环图11十、执行机构计算12十一、参考资料14十二、小结15一、设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。这样推头2就可以马上再开始推送工作。这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。因而就要求推头2按图示的abcdea线路运动。即实现“平推水平退回下降降位退回上升复位”的运动。设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。在推头回程中,除要求推头低位
2、退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。至于“cdea”部分的线路形状不作严格要求。 图1 推包机构执行构件运动要求设计任务:1 至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2 确定电动机的功率与转速;3 设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图;4 对输送工件的传动系统提出一种方案并进行设计;5 编写课程设计说明书。二、功能分解由运动示意图可知此机构可分解为俩个运动,凸轮机构控制运输爪的升降,导杆机构控制往复运动,俩者的配合及凸轮的设计可以达到abcde的轨迹。如图4.1中1、2为主动件,2、3、4和5的导杆机构,可以完成a、b、c间或c、d间的往复运动,1的凸轮与4机构的平底接触,可以使整个4机构上下往复运动,从而有abc与cd间的高度差,通过设计凸轮的参数,配合导杆机构完成整个abcde的运动轨迹。所以功能一:导杆机构实现a、b、c或d、e间的往复运动,功能二:凸轮机构实现4机构的上下往复运动三、运动转换运动转换即传动机构和执行机构之间的转换。在本方案中,只要为将凸轮的转动转换为连杆的双向直线运动和上下
3、运动。在本案中,凸轮的DBC段为圆弧,在此段上凸轮转动时平底从动件高度不变,前后移动,在D点时工件在a处,在BC段某一处时在b处,在C点时工件在c处,CE段时凸轮半径逐渐减小,平底从动件向下运动,工件开始下降,到E点时下降到d处,EF为圆弧段,凸轮转动时平底从动件上下不运动,做水平运动,由d运动至e,FD段凸轮半径逐渐增加,平底从动件向上运动,回到a处。四、执行机构的选择与比较方案一:用偏置滑块机构与凸轮机构的组合机构,偏置滑块机构与往复移动凸轮机构的组合(图2)。在此方案中,偏置滑块机构可实现行程较大的往复直线运动,且具有急回特性,同时利用往复移动凸轮来实现推头的小行程低头运动的要求,这时需要对心曲柄滑块机构将转动变换为移动凸轮的往复直线运动。图 2 偏置滑块机构与往复移动凸轮机构的组合如果采用直动推杆盘形凸轮机构或摆动推杆盘形凸轮机构,可有另两种方案(图3、图4)。图 3 偏置滑块机构与盘形凸轮机构的组合之一图4 偏置滑块机构与盘形凸轮机构的组合之二方案二:采用导杆机构与凸轮机构的组合机构图5、导杆机构与凸轮机构的组合机构方案三:双凸轮机构与摇杆滑块机构的组合五、原动机的选择由题可
4、知,选择的原动机为电动机,采取单机集中驱动的驱动方式。这种驱动方式传动装置复杂,操作麻烦,功率较大,但价格便宜。电动机的尺寸较大,输出刚度较硬,直流电动机可通过改变电阻等来进行调速,交流电动机可通过变频、变极进行调速。电动机通常是单向反转的,在正常温度下使用,电机采用风冷。使用电动机时,需考虑过载保护装置,以防烧坏电动机。电动机噪声小,初始成本低,运转费用最低,维护要求最少,功率范围较广。题目要求5-6s包装一个件,即要求曲柄和凸轮的转速为12r/min考虑到转速比较低,因此可选用低转速的电动机,查常用电动机规格,选用Y160L-8型电动机,其转速为720r/min,功率为7.5kW。六、运动方案的拟定方案一:双凸轮机构与摇杆滑块机构的组合,(见图2)图2双凸轮机构与摇杆机构滑块机构的组合方案一的运动分析和评价:该机构由凸轮1和凸轮2,以及5个杆组成。机构一共具有7个活动构件。机构中的运动副有7个转动副,4个移动副以及两个以点接触的高副。其中机构的两个磙子存在两个虚约束。由此可知: 机构的自由度 F=3n-2Pl+Ph-p =1 机构中有一个原动件,原动件的个数等于该机构的自由度。所以
《课程设计包装机推包机构运动简图与传动系统设计资料》由会员206****923分享,可在线阅读,更多相关《课程设计包装机推包机构运动简图与传动系统设计资料》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
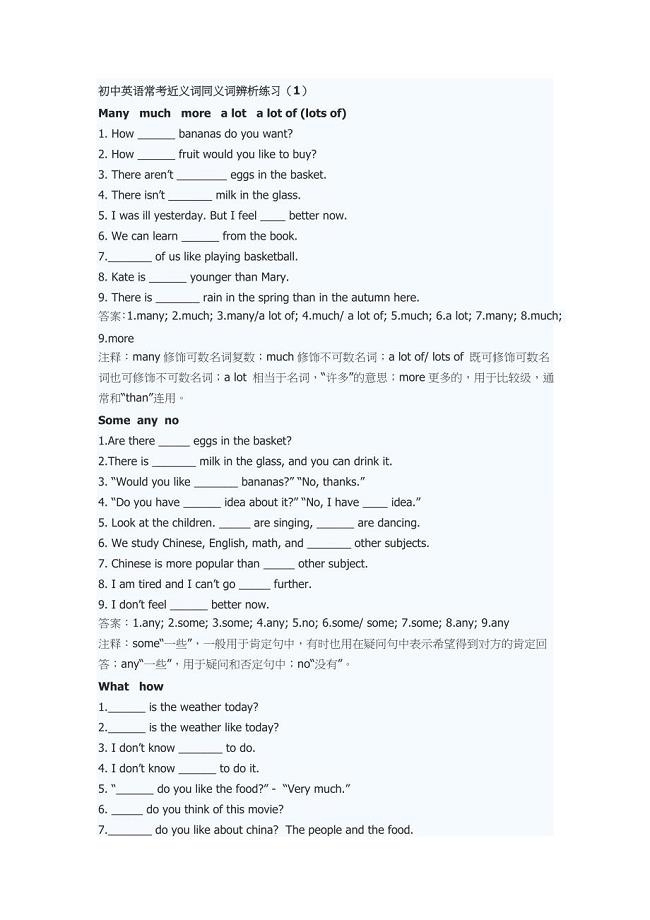
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
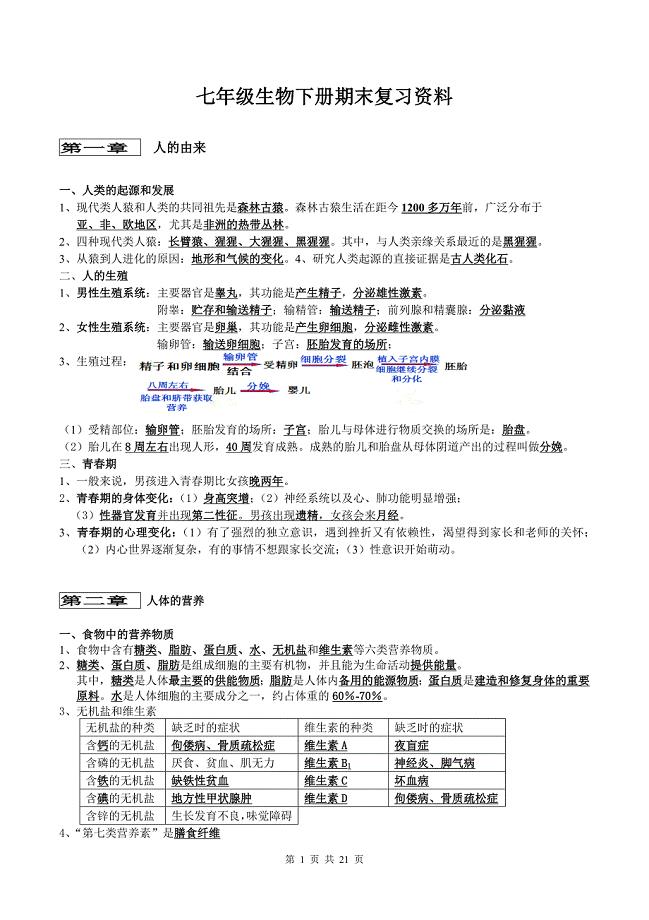
初中人教版七年级上册下册全册生物复习提纲21页 (1)
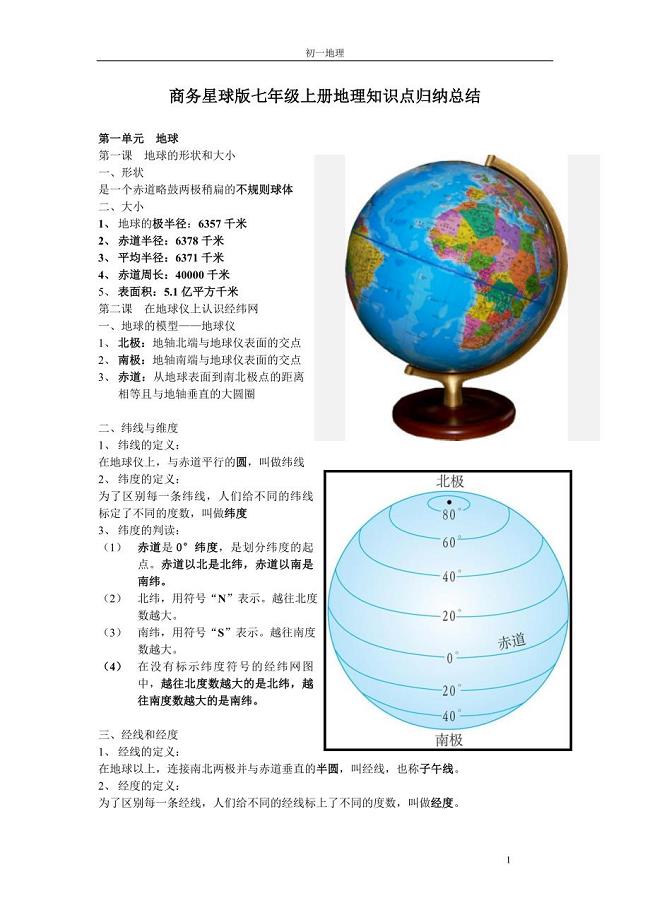
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 高三历史复习基本策略
高三历史复习基本策略
2024-05-08 2页
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页