
基于PROE的数控机床机械手上下料设计毕业论
46页
1、 届本科毕业论文 题题 目:目:基于基于 ProeProe 的数控机床上下料机械手设计的数控机床上下料机械手设计 学生姓名:学生姓名: 学学 号:号: 专专 业:业: 指导老师:指导老师: 职职 称:称: 完成日期:完成日期: 2011 年年 6 月月 福建工程学院毕业设计(论文) I 目 录 目目 录录2 1.1. 绪论绪论1 1.1 选题背景1 1.2 设计目的1 1.3 设计原则2 2.2. 基于基于 PROEPROE 的机械手结构设计的机械手结构设计2 2.11 PROE 的优点.2 212 总体设计4 2.1.3 机械手的规格参数4 2.1.4 手臂运动参数 5 2.1.5 驱动方式的选择和设计5 2.1.6 设计具体采用方案6 2.2 机械手腰座结构的设计7 2.2.1 设计具体采用方案7 2.3 机械手末端执行器(手爪)的结构设计 8 2.3.1 机器人夹持器的运动和驱动方式 8 2.3.2 设计具体采用方案 9 2.4 机械手腕部的结构设计10 2.5 液压缸的设计 11 2.6 导向套的设计12 2.7 中间结构的组成12 2.8 齿轮的设计与强度计算 13 2.9
2、工业机器人驱动系统的选择原则 16 2.10 总装图 19 3.3. 理论分析和设计计算理论分析和设计计算21 3.1 液压传动系统设计计算 21 3.1.1 确定液压系统基本方案21 福建工程学院毕业设计(论文) II 3.1.2 确定液压系统的主要参数22 3.1.3 计算和选择液压元件26 3.1.4 液压系统性能的验算28 3.2 电机选型有关参数计算28 3.2.1 确电机规格28 4 4、机械手运动分析、机械手运动分析29 5 5、总结、总结39 6.6.参考文献参考文献.40 7.7.致致 谢谢.41 福建工程学院毕业设计(论文) III 基于基于 ProeProe 的数控机床上下料机械手设计的数控机床上下料机械手设计 摘要:通过对机械设计制造专业大学本科两年的所学知识进行整合,对工业机械手各部分 机械结构和功能的论述和分析,设计了一种圆柱坐标形式的数控机床上下料机械手。重点 针对机械手的腰座、手臂、手爪等各部分机械结构以及机械手控制系统进行了详细的设计。 具体进行了机械手的总体设计,腰座结构的设计,机械手手臂结构的设计,机械手腕部的 结构设计,末端执行器(手爪)的结构设
3、计,机械手的机械传动机构的设计,机械手驱动 系统的设计。同时对液压系统和控制系统进行了理论分析和计算。 关键词:机械手 ;液压伺服定位 ;电液系统 福建工程学院毕业设计(论文) IV Abstract Integrate the knowledge of the past four years of undergraduate course of Machine, discuss and analysis the each part and function of manipulator; design a kind of cylinderical coordinate manipulator used to pack and unload work piece for CNC machine tools. In particular, made the detailed design about base, arm, and end effector and the control system etc. including Total design, waists construc
4、tion design, the arms construction design, the wrists construction design, the end effectors construction design, and the drive system of manipulator. At the same time, analysis and compute the hydraulic pressure system and control system In a word, the design of the manipulator has come to the anticipant object. Keyways: Manipulator;Hydraulic servo control;Electrohydraulic system 福建工程学院毕业设计(论文) 1 1 绪论 1.1 选题背景 机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动 化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。近年来, 随着电子技术特别是电子计算机的广
《基于PROE的数控机床机械手上下料设计毕业论》由会员206****923分享,可在线阅读,更多相关《基于PROE的数控机床机械手上下料设计毕业论》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
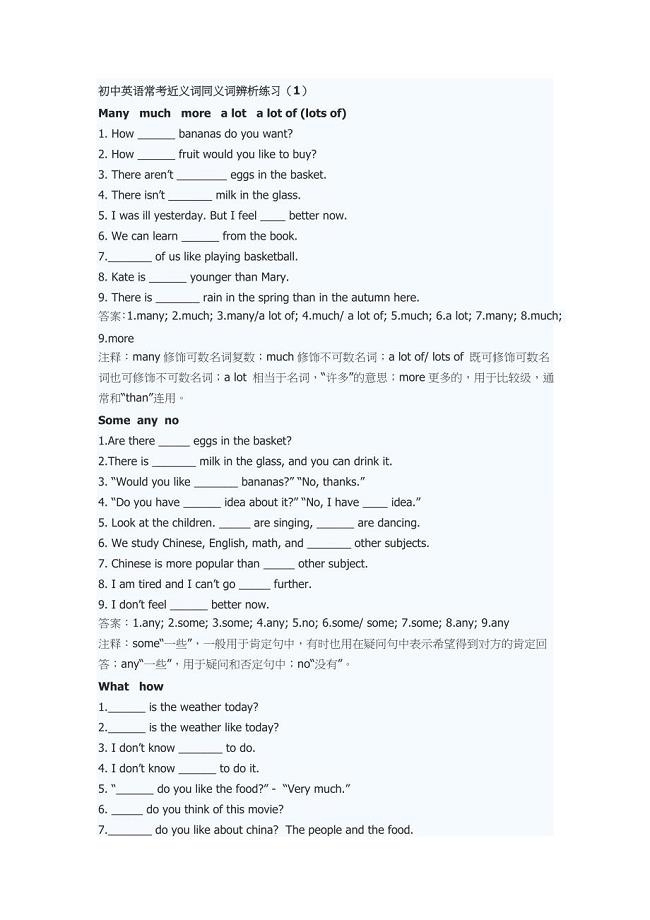
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
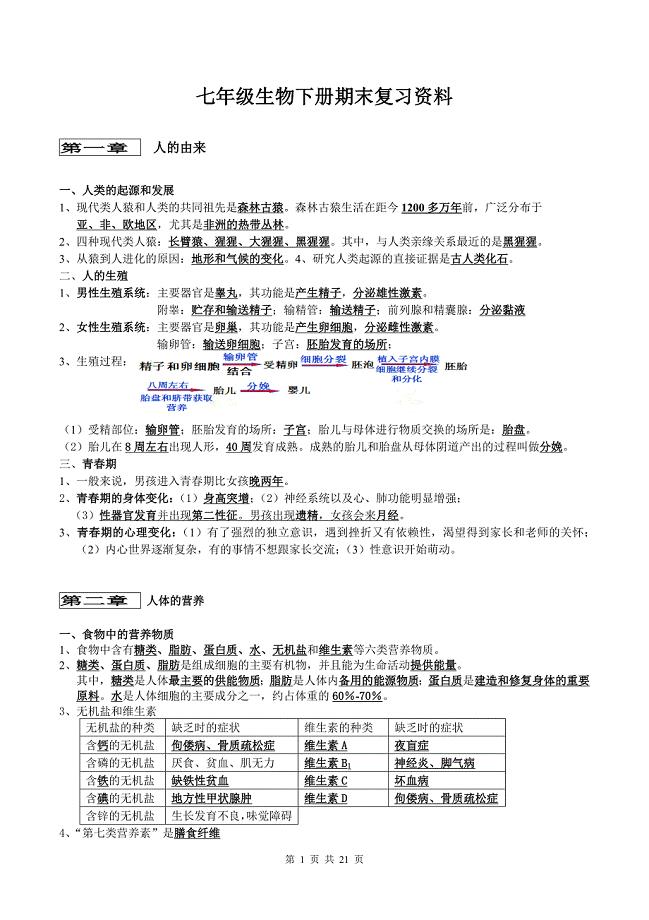
初中人教版七年级上册下册全册生物复习提纲21页 (1)
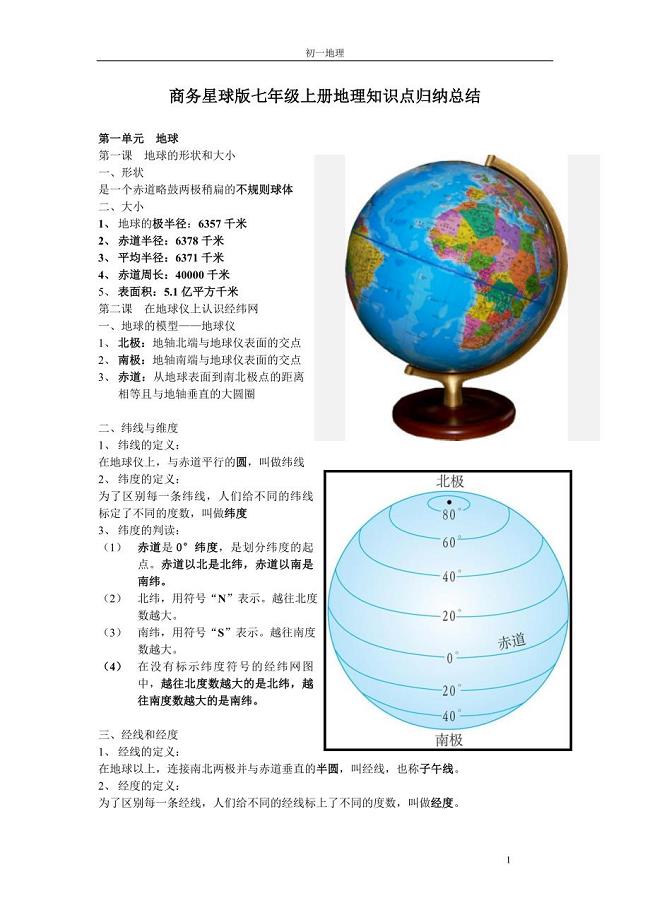
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页