
51循迹避障小车论文答辩PPT
13页
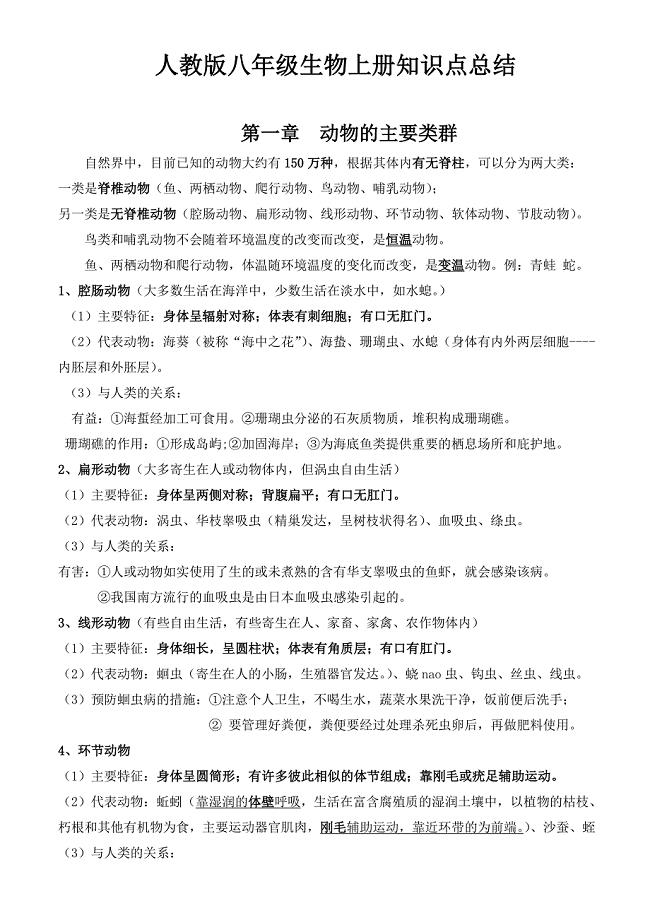
1、麻省理工学院2019年 论文答辩,基于51单片机的循迹避障小车的设计,指导老师:* 报告人:*,日期:2019.06.21,班 级 :*,主 要 内 容:,选题背景:,第一代 可编程的在线型小车,第二代 离线编程型小车,第三代 智能型小车,以多种外部传感器构成感官系统,通过采集外部的环境信息,精确地描述外部环境的变化。,装有简单的传感器,可以感觉到自身的的运动位置,速度等其他物理量,电路是一个闭环反馈的控制系统,能适应一定的外部环境变化。,不装载任何传感器,只是采用简单的开关控制,通过编程来设置循迹小车的路径与运动参数。,智能车作为现代社会的新产物,是以后的发展方向,它可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。,循迹避障小车特点:,1,循迹避障小车是指装备如电磁,光学或其他自动导引装置,通过电脑程序来控制,沿设定的引导路径行驶,无需驾驶员操作,并能避过途中的障碍物。,2,循迹避障小车的另一个特点是高度自动化,可以根据设计要求、生产工艺流程等改变而灵活改变行驶路径,而且改变运行路径的费用与传统的输送带和流水线线相比非常低廉。
2、,3,此外,循迹小车依靠蓄电池提供动力,具有清洁生产、运行过程中无噪音、无污染的特点,不仅自身节能环保,还能代替人从事危险任务。,高级智能车的应用实例,Google 无人驾驶汽车,Amazon 物流搬运车,中国“玉兔”月球车,美国“好奇号”火星探测器,循迹小车总体设计:,循迹避障小车控制系统结构框图,本系统采用简单明了的设计方案。以AT89C51为主控芯片,主要包括避障模块、电源模块、电机驱动模块等。通过循迹及避障传感器来采集周围环境信息来反馈给CPU,通过主控的处理,来控制电机的运转,从而实现循迹与避障的功能,达到智能行驶。,实时检测路径,并按照指定路线行驶,实时检测障碍物,并绕过继续行驶,预期功能,晶振电路:,本设计选用12MHZ无源晶振、2个22pF电容,使得一个机器周期是1s。晶振的作用是为系统提供基本的时钟信号,两个电容则是起到并联谐振的作用。,复位电路:,当系统上电后,由于电容充电,使RST持续一段高电平时间。当单片机已在运行之中时,按下复位键也能使RST持续一段时间的高电平,从而实现上电且开关复位的操作。,循迹和避障模块,循迹模块: 信号端为检测信号输出,当遇到黑线,黑线
《51循迹避障小车论文答辩PPT》由会员206****923分享,可在线阅读,更多相关《51循迹避障小车论文答辩PPT》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
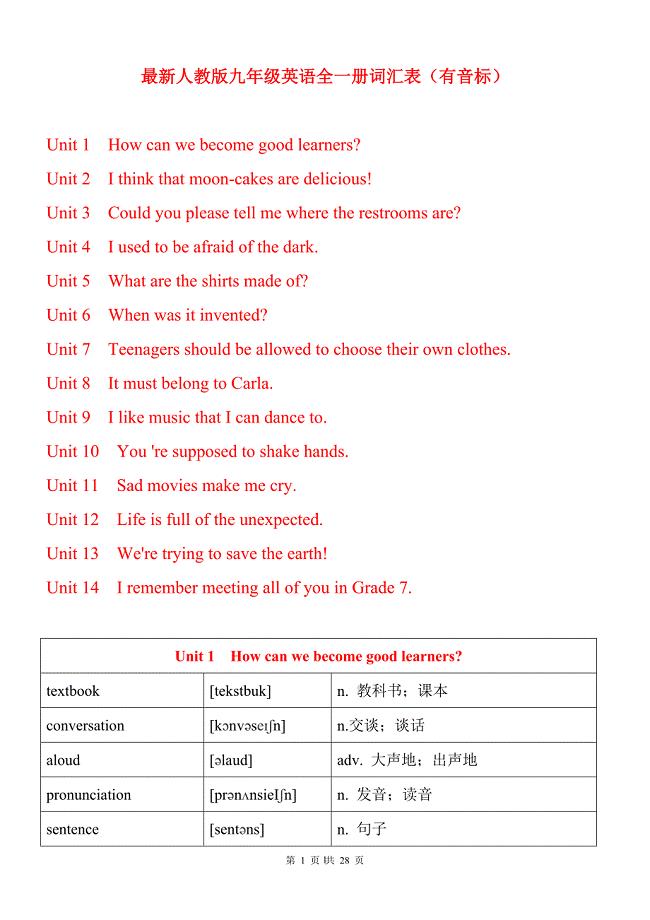
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
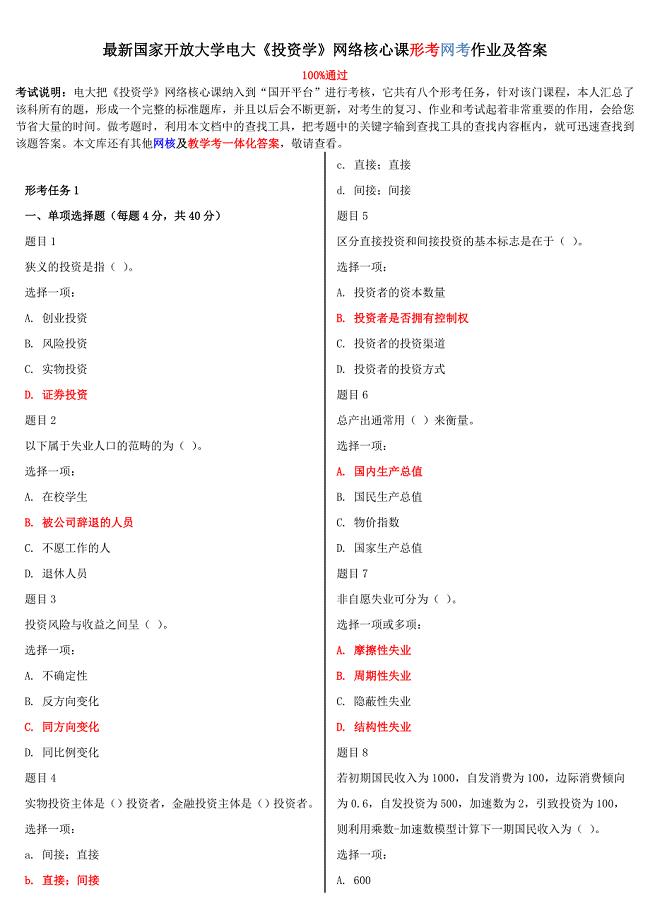
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
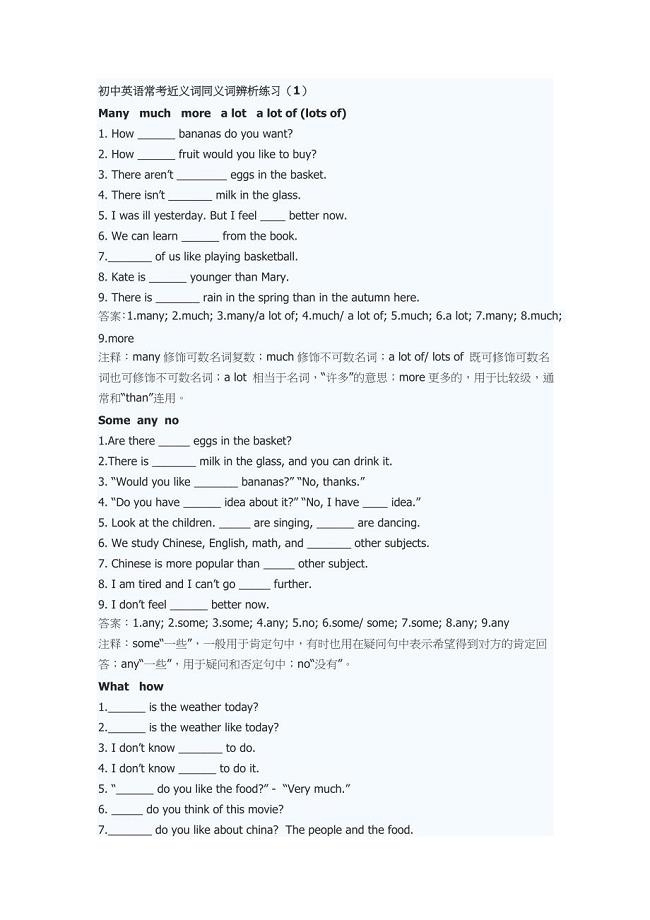
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
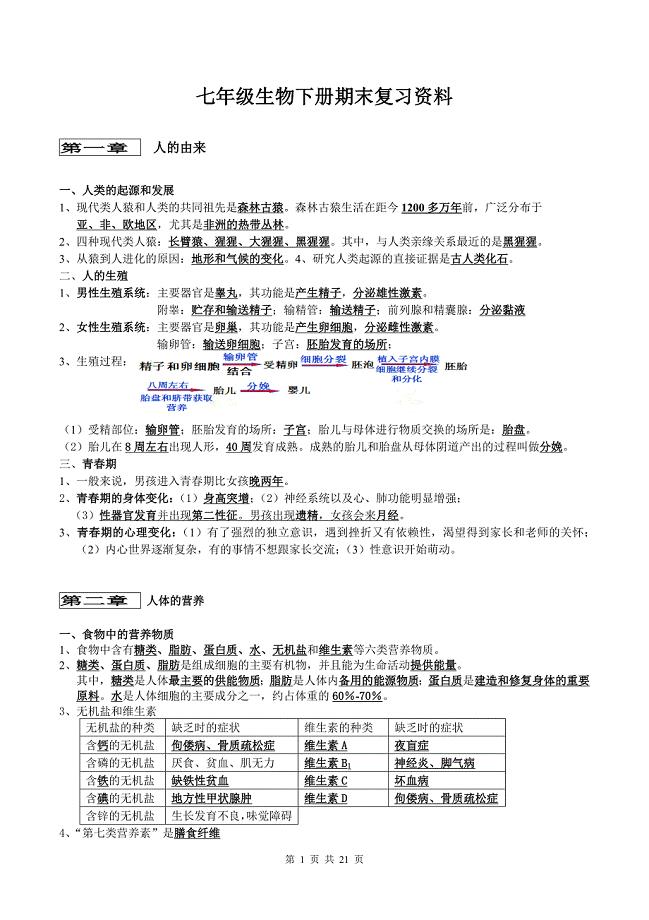
初中人教版七年级上册下册全册生物复习提纲21页 (1)
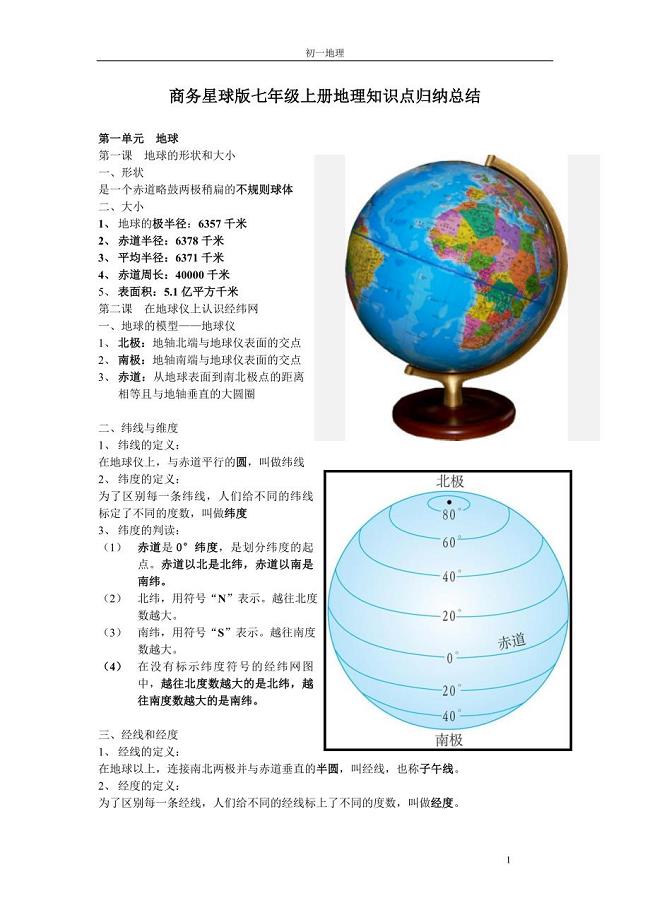
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
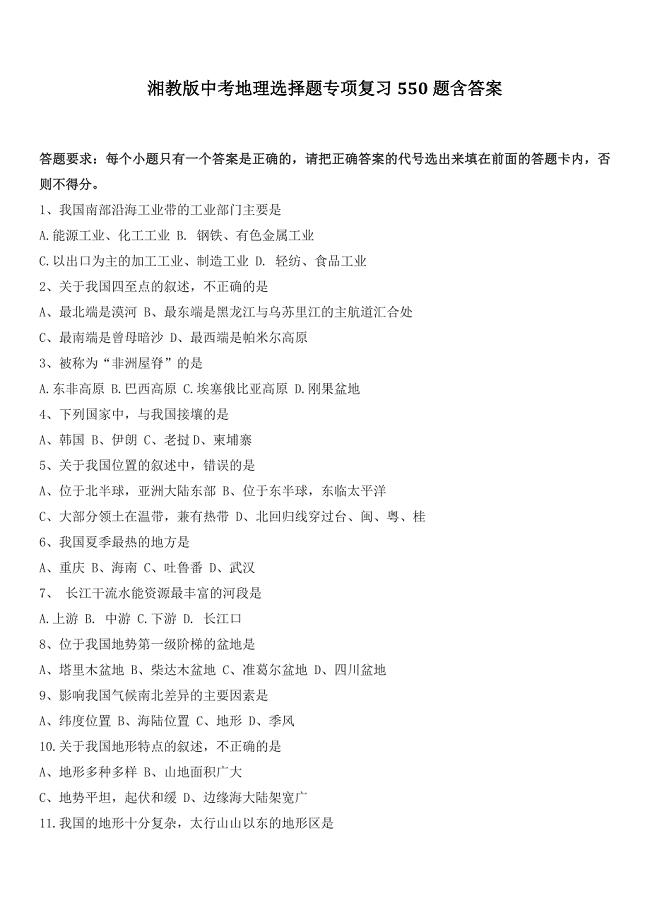
中考地理选择题专项复习550题含答案
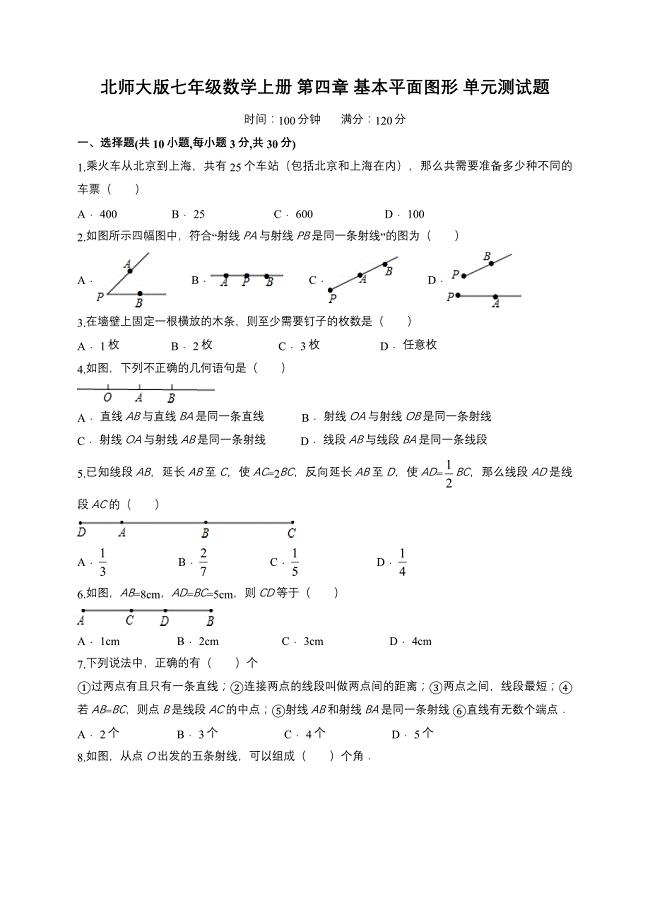
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 夏天-遇见初夏-荷花模板2
夏天-遇见初夏-荷花模板2
2024-02-23 27页
模板&范本:毕业答辩PPT模板F
2024-01-08 23页
模板&范本:毕业答辩PPT模板H
2024-01-08 23页
模板&范本:毕业答辩PPT模板D
2024-01-08 31页
模板&范本:毕业答辩PPT模板C
2024-01-08 18页
模板&范本:毕业答辩PPT模板B
2024-01-08 27页
模板&范本:毕业答辩PPT模板E
2024-01-08 35页
模板&范本:毕业答辩PPT模板G
2024-01-08 20页
模板&范本:毕业答辩PPT模板A
2024-01-08 12页
医学课题申报答辩研究目标及过程PPT模板
2023-07-06 26页