
多旋翼理论.pptx
57页
1、,无人飞行器概述,用途,平台类型,CON TENTS,重量,无人飞行器的分类,民用无人机可分为航拍影视 类无人飞行器、巡查/监视无人飞行器、农用无人飞行器、气象无人飞行器、勘探无人飞行器以及测绘无人飞行器等。,民用,军用,军用无人机可分为侦察无人机,诱饵无人机,电子对抗无人机,攻击无人机,战斗无人机等,小型:小于等于5700KG 大型:大于5700KG,按重量分,微型:小于等于7KG 轻型:大于7KG,小于等于160kg.,固定翼飞行器,是飞机机翼相对固定无需旋转,靠经过机翼的气流提供升力的飞行器类型。也是世界上保有量最大的载人飞行器。 固定翼飞行器是自稳定系统,也是完整驱动系统,它在任何状态下都可以自由调整姿态,并且能够保持住当前状态。 固定翼飞行器的优点是在三类飞行器里续航时间最长、飞行效率最高、载荷最大、飞行稳定性高,缺点是起飞的时候必须要助跑或者借助器械弹射,降落的时候必须要滑行或者是利用降落伞降落。,固定翼,按平台类型,直升机,直升机飞行器是由一个或者两个主旋翼提供升力的垂直起降型飞行器。是不稳定系统,升空之后如果不施加控制,飞行器无法保持飞行稳定。从飞行控制来讲直升机属于完
2、整驱动系统,可以自由调整姿态。 直升机飞行器的特点是可垂直起降、无需跑道、地形适应能力强,缺点是机械结构复杂、维护成本高、续航及速度都低于固定翼飞行器。,多旋翼飞行器是指拥有三个或者更多旋翼的直升机类飞行器,能够垂直起降,属于直升机飞行器的一种,一般称之为多旋翼飞行器,多旋翼飞行器属于不稳定系统,其在飞行及悬停过程中无法实现自稳定;同时,多旋翼飞行器也不是完整驱动系统。所以多旋翼飞行器自身的稳定性在三种主要的飞行器当中是最低的,其正常的飞行必须借助自稳定系统的辅助。 多旋翼飞行器的特点是能够实现垂直起降,并且自身机械结构简单,无机械磨损;缺点是其续航及载重在三种飞行器当中是最低的。,多旋翼,多旋翼飞行器的发展,2005 年初步出现的多旋翼飞行器往往还是以玩具的形式出现在市场,无法承担更多实际的作用,随着深圳市大疆创新科技有限公司不断推出更简单实用的新型多旋翼飞行器,多旋翼飞行器市场在 2013 后迅速爆发。发展至今,多旋翼无人飞行器已经广泛应用在航拍、影视、农业、电力等方方面面改变着人们的生活。,综合比较,续航和载重,可靠性,操作难易,固定翼直升机多旋翼,多旋翼=直升机固定翼,多旋翼固
3、定翼直升机,起降便利,多旋翼直升机固定翼,多旋翼飞行器布局原理,X型多旋翼飞行器 作为多旋翼中最基础也是最常见的气动布局。 由于其优异的性能与简单的结构,深受众多多 旋翼爱好者的喜爱。,x型的6旋翼、8旋翼 具有x型4旋翼的特性的同时,还拥有比4旋翼更好的结构效率、 承载重量以及冗余度等性质,深受航拍、影视行业用户青睐。,十型多旋翼 最早出现的一种多旋翼气动布局之一。因其气动布局简单,便于简化飞控算法的开发。但由于其构造,导致飞行器航拍时前行会导致正前方螺旋桨进入画面造成不便,随着飞 控系统的进化,逐渐被 X 型多旋翼布局取代。,x型的6旋翼、8旋翼 具有x型4旋翼的特性的同时,还拥有比4旋翼更好的结构效率、 承载重量以及冗余度等性质,深受航拍、影视行业用户青睐。,x型的6旋翼、8旋翼 具有x型4旋翼的特性的同时,还拥有比4旋翼更好的结构效率、 承载重量以及冗余度等性质,深受航拍、影视行业用户青睐。,多旋翼飞行器的H气动布局 与X 型机架气动布局相似,但优点在于通常被设计为折叠结构,故同时拥有 X 型布局的优点,且容易折叠,体积较小。因此受到广泛的青睐。,四旋翼是结构简单、飞行效率相对
4、高效的一种常见多旋翼结构,也是目前市场上保有量最大的多旋翼飞行器类型。四旋翼玩具、小型航拍机一般都选用该结构。但是要注意的是,四旋翼没有动力冗余,任何一个电机出现问题停转,飞行器都将无法控制而摔机。,理论上桨叶越大气动效率越高,从这个角度中大型多旋翼飞行器也应采用四轴设计,但是因为四旋翼没有动力冗余,而六旋翼的设计实现了动力冗余,六旋翼在出现一个电机停转的情况下依然可将飞行器安全降落。所以在中大型轴距的多旋翼飞行器多采用六轴结构。,更大型的多旋翼飞行器可能会采用更多轴数的设计,例如 8 轴、16 轴,甚至还有更高轴数的设计,这里就不一一进行累述。,多旋翼飞行器的飞行原理,以四旋翼飞行器为例,电机1和电机3 逆时针旋转的同时,电机2和电机4顺时针 旋转,因此飞行器平衡飞行时,陀螺效应 和空气动力扭矩效应全被抵消。 陀螺效应:就是物体转动时的离心力会使自身 保持平衡。 空气动力扭矩效应是气动面的反向作用力, 螺旋桨会对机身产生反向力。,多旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实现升力的变化,进而达到控制飞行姿态的目的。,多旋翼飞行器的控制,一般情况下,多旋翼飞行器可以通过 调节
《多旋翼理论.pptx》由会员小**分享,可在线阅读,更多相关《多旋翼理论.pptx》请在金锄头文库上搜索。
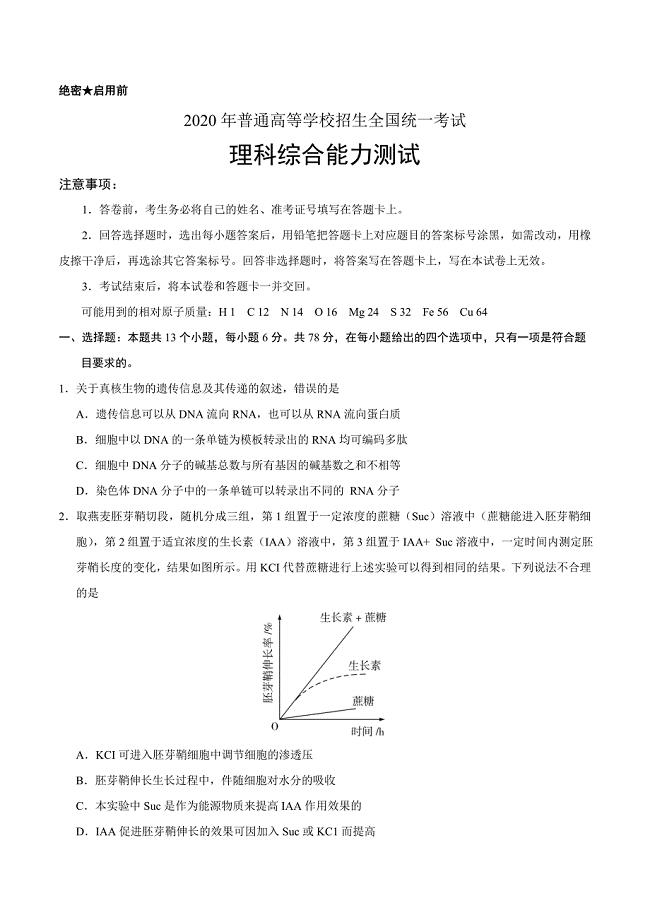
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 企业高效开会秘诀
企业高效开会秘诀
2024-01-31 15页
管理者的职责认知
2024-01-31 21页
高效会议秘诀培训PPT
2024-01-31 37页
项目管理流程(5大过程)
2024-01-31 30页
商业分析工具:战略分析与规划工具(精品)
2024-01-31 22页
商业分析工具:由商业问题到最终成果
2024-01-31 48页
管理者的自我成长
2024-01-31 32页
项目管理流程培训PPT
2024-01-31 40页
商业分析工具:销售数据分析方法
2024-01-31 31页
会议管理知识
2024-01-31 20页