
自动控制理论21
28页
1、知识点 w系统微分方程的建立方法 w Laplace变换的定义及性质 w 传递函数的定义及性质 w 控制系统中的典型环节及传递函数的数学模 型 w 动态结构图的建立方法及简化 w 准确求取系统的传递函数 w 自动控制系统中微分方程、传递函数、动态 结构图之间的关系及相互转换 Date1 2.1微分方程 数学模型:描述控制系统变量(物理量)之间动态关系的数 学表达式。常用的数学模型有微分方程,传递函数,结构图, 信号流图,频率特性以及状态空间描述等。 例如对一个微分方程,若已知初值和输入值,对微分方程 求解,就可以得出输出量的时域表达式。据此可对系统进行 分析。所以建立控制系统的数学模型是对系统进行分析的第 一步也是最重要的一步。 控制系统如按照数学模型分类的话,可以分为线性和非线 性系统,定常系统和时变系统。 概述 Date2 线性系统:如果系统满足叠加原理,则称其为线性系统。叠 加原理说明,两个不同的作用函数同时作用于系统的响应,等 于两个作用函数单独作用的响应之和。 线性系统对几个输入量同时作用的响应可以一个一个地处 理,然后对每一个输入量响应的结果进行叠加。 线性定常系统和线性时
2、变系统:可以用线性定常(常系数)微 分方程描述的系统称为线性定常系统。如果描述系统的微分方 程的系数是时间的函数,则这类系统为线性时变系统。 宇宙飞船控制系统就是时变控制的一个例子(宇宙飞船的 质量随着燃料的消耗而变化)。 概述 Date3 古典控制理论中(我们所正在学习的),采用的是单输入 单输出描述方法。主要是针对线性定常系统,对于非线性系统 和时变系统,解决问题的能力是极其有限的。 非线性系统:如果不能应用叠加原理,则系统是非线性的。 下面是非线性系统的一些例子 : 概述 Date4 第一节 控制系统的微分方程 Date5 微分方程的编写应根据组成系统各元件工作过程中所遵循 的物理定理来进行。例如:电路中的基尔霍夫电路定理,力学 中的牛顿定理,热力学中的热力学定理等。 控制系统的微分方程 Date6 控制系统的微分方程 由: ,代入得: 这是一个线性定常二阶微分方程。 解:据基尔霍夫电路定理: 输入 输出 LR C i 例2-1:写出RLC串联电路的微分方程。 Date7 例2-2 求弹簧-阻尼-质量的机械位移系统的微分方程。 输入量为外力F,输出量为位移x。 解:图1和图2分别
3、为系 统原理结构图和质量块 受力分析图。图中,m 为质量,f为粘性阻尼系 数,k为弹性系数。 m f m F F 图2图1 根据牛顿定理,可列出质量块的力平衡方程如下: 这也是一个两阶定常微分方程。X为输出量,F为输入量。 在国际单位制中,m,f和k的单位分别为: 控制系统的微分方程 Date8 例2-3电枢控制式直流电动机 这里输入是电枢电压ua和等效到电机 转轴上的负载转矩Mc,输出是转速w 电枢回路方程为 其中ea 为反电势 此时激磁电流为常数,所以 Ce称为电动机电势常数 Cm称为电动机转矩常数,再根据牛顿定律可得机械转动方程 电机通电后产生转矩 控制系统的微分方程 Date9 其中 和分别称为电磁时间常数和机电时间常数 整理得 分别是转速与电压传递系数和转速与负载和 传递系数。这里已略去摩擦力和扭转弹性力。 控制系统的微分方程 Date10 需要讨论的几个问题: 1、相似系统和相似量: 我们注意到例2-1和例2-2的微分方程形式是完全 一样的。 这是因为:若令 (电荷),则例2-1式的结果变 为: 可见,同一物理系统有不同形式的数学模型,而不同类型的系 统也可以有相同形式的数
4、学模型。 相似系统和相似量 定义具有相同的数学模型的不同物理系统称为相似系统。 例2-1和例2-2称为力-电荷相似系统,在此系统中 分别与 为相似量。 作用利用相似系统的概念可以用一个易于实现的系统来模拟 相对复杂的系统,实现仿真研究。 Date11 2、非线性元件(环节)微分方程的线性化 在经典控制领域,主要研究的是线性定常控制系统。如果 描述系统的数学模型是线性常系数的微分方程,则称该系 统为线性定常系统,其最重要的特性便是可以应用线性叠 加原理,即系统的总输出可以由若干个输入引起的输出叠 加得到。 非线性环节微分方程的线性化 Date12 若描述系统的数学模型是非线性(微分)方程,则相应 的系统称为非线性系统,这种系统不能用线性叠加原理。在 经典控制领域对非线性环节的处理能力是很小的。但在工程 应用中,除了含有强非线性环节或系统参数随时间变化较大 的情况,一般采用近似的线性化方法。对于非线性方程,可 在工作点附近用泰勒级数展开,取前面的线性项。可以得到 等效的线性环节。 设具有连续变化的非线性函数为:y=f(x) ,若取某一平衡状态为工作点,如下图 中的 。A点附近有点为 ,当
《自动控制理论21》由会员命****币分享,可在线阅读,更多相关《自动控制理论21》请在金锄头文库上搜索。
Unit4-Don’t-eat-in-class!-Section-B(2a-2c)

IATF16949-风险和机遇控制程序
SJ-201-金地集团项目投资决策评审管理阶段设计成果标准
射频卡协议ISO14443--全文中文
实用ERP系统操作流程及岗位责任管理制度

定稿-计算机化系统管理规程

安防培训学习资料模板

安徽合肥工业地产项目定位市场调研营销策划
安全卫生指导手册(丰田安全操作)

孩子们主动洗手——中班良好卫生习惯养成案例分析
如何防范股权转让程序瑕疵的法律风险?
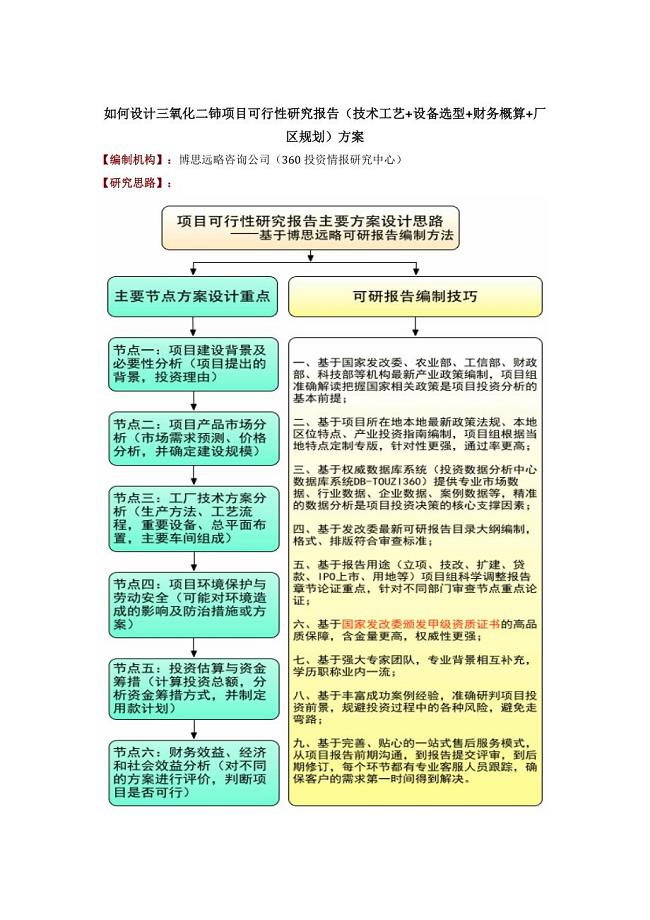
如何设计三氧化二铈项目可行性研究报告(技术工艺-设备选型-财务概算-厂区规划)
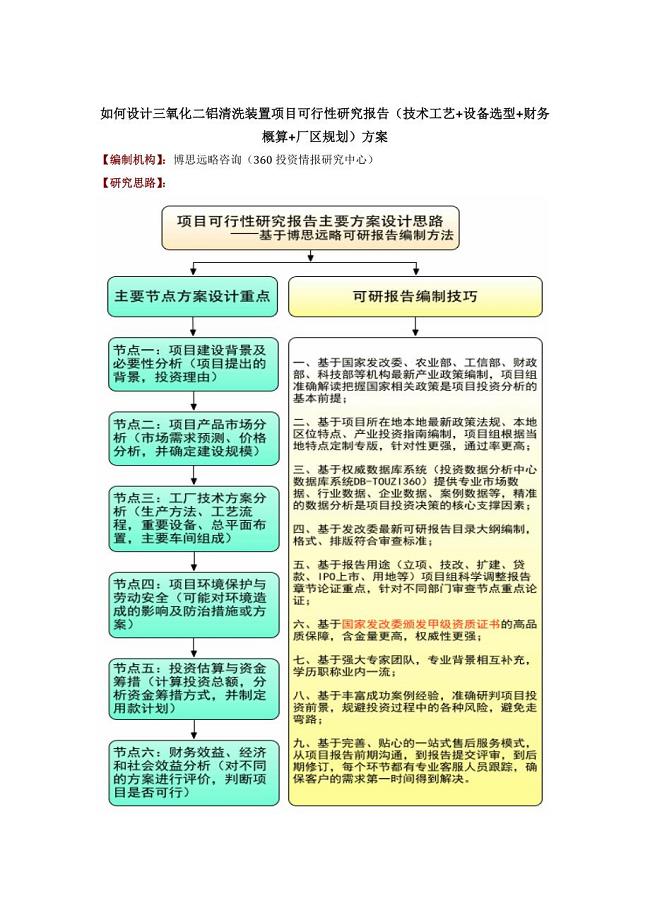
如何设计三氧化二铝清洗装置项目可行性研究报告(技术工艺-设备选型-财务概算-厂区规划)
天津大学-电子商务网站设计与管理离线考核2017.12

天月茶城方案(MOON)

大足区公共资源综合交易服务中心-重庆大足区公共资源综合交易中心
大学生创业设计“醋艺大发”醋吧
外贸企业相关业务需知(仅作参考)
外文资料翻译(β沸石作为制取烷基糖苷表面活性剂的催化剂:晶体的大小和疏水性的作用)

外文翻译车床
 【高中语文】《子路+曾皙+冉有+公西华侍坐》课件++统编版高中语文必修下册+
【高中语文】《子路+曾皙+冉有+公西华侍坐》课件++统编版高中语文必修下册+
2024-04-26 42页
【高中语文】《子路+曾皙+冉有+公西华侍坐》课件++统编版高中语文必修下册 +
2024-04-26 47页
【高中语文】《玩偶之家(节选)》课件+统编版高中语文选择性必修中册+
2024-04-26 46页
【高中语文】《说“木叶”》课件+统编版高中语文必修下册+
2024-04-26 32页
【高中语文】《蜀道难》课件+统编版高中语文选择性必修下册+
2024-04-26 22页
【高中语文】《氓》课件+统编版高中语文选择性必修下册+
2024-04-26 46页
【高中语文】《秦腔》课件+统编版高中语文选择性必修下册+
2024-04-26 28页
【高中语文】《念奴娇+赤壁怀古》课件+统编版高中语文必修上册+
2024-04-26 35页
【高中语文】《秦腔》课件++统编版高中语文选择性必修下册+
2024-04-26 28页
【高中语文】《雷雨(节选)》课件+统编版高中语文必修下册+
2024-04-26 48页