
机械设计方案书
15页
1、编号:时间:2021年x月x日书山有路勤为径,学海无涯苦作舟页码:第1页 共1页机械设计大赛方案书队内成员:罗大森 盛博荣 陈伟本次机械设计大赛要求制作完成规定任务的机器人,以下是我们队的设计方案与对应实现机构说明.整体三维图如下作品特色:1. 作品以四杆机构实现水平移动,凸轮机构实现垂直移动,易于计算和制作实现2. 机器人的抓取运动都为直线,便与操作.3. 机器人上单构件可实现多功能,节约成本4. 机器人设计紧凑节约空间,活动灵活5. 充分考虑可制作性,在每个环节都有可实现机构(一) 设计方案拟定; 1.过挡板, 穿越”隧道”由于设计机器人的长度为300mm375mm(挡板到”隧道”距离),宽度260mm350mm(“隧道”宽度).故可通过对轮部的减速操作使机器人做绕定点转动,达到转向并进入“隧道”的效果.2. 穿越“河道”易看出河道上的桥宽(380mm)大于机器人两轮间距,我们队对于这个过程提出两个底盘设计方案。底盘方案一:使用压扣机构及机身的移动装置将可移动的铝桥中的一条向内平移至轮轮宽处,即可过桥.如下截图可以看出车身与车身底板以移动副相连接以实现车身的左右移动,移动副可由齿轮
2、齿条带动或由螺杆机构带动从而实现移“桥”的功能。之后由带槽的履带轮子嵌入桥内,与桥相扣保证车子在桥上的稳定性。底盘设计方案二:通过车底的宽度改变,使穿过“隧道”后的车底适当地变宽以达到桥宽,以下为该方案车底盘设计,车身以上的机构不进改动.以下图左边的滑块在螺纹传动机构的作用下向内移动,使两黄色杆伸缩达.同时带动右边的双滑块也在移动向内移动.车身变宽.(此为底部视图黄色为交叉杆,中间以转动副连接)3. 机器人将“救援目标”把平台(四杆机构前后视图)一.如图所示,在机身上采用四杆机构只要在三角块上顶处加一电机即可实现钳子部分的水平运动(钳子的高度已经高于围栏),四杆机构运动轨迹便于计算. 三角块与底板为转动连接,使图示四杆机构可以三百六十度转动,既可用于节省机身空间也可实现物块拿取后将物块放到其边上的载物台上,提高取物效率. 二. 钳子(如下图示)处以双齿轮带动运动,并以凸轮机构实现钳身的上下运动,打开平台(3)上方的盖子,并实现钳子的上下运动取物.在齿轮处另加两个钩子实现两钩平行时的底部张开面积小于载物台3上的盖子面上的小孔直径30MM (同时如图的钩子设计也不影响钳子的夹物动作,二者互不干涉),故可伸入孔内后转动齿轮后使两钩向外运动,可以钩住盖子下方,此时可用凸轮转动带动钳子向上运动,使盖子被拉起,通过三角块的转动将其放置一边,即可进行物块的拿取工作。(钳身示意图) (凸轮机构及钩子示意图) 4.机器人将另一“救援目标”从平台取出(1)机器人移动平台,用位于三角块后方的长杆插入平台门(可推拉的门)上通孔内,机器人往前进,拉动门移开,再用移动平台使多余部分移出孔外。(2)采用钳子一一将物块夹置车子左边的载物台上(载物台图)(长杆图) (长杆处俯视图)5. 即把已经取出的“救援目标”放入安全区(1)机器人从平台左边开出.(2)载物台通过前方的转动副转动向前翻,把物块放入安全区.(过程如下) 注:本队成员在上学期分别参加了工程实训大赛和“斯特林”发动机制作赛,都有很好的零件加工能力.谢谢各评委老师的点评!第 1 页 共 1 页
《机械设计方案书》由会员桔****分享,可在线阅读,更多相关《机械设计方案书》请在金锄头文库上搜索。
民航工程技术员工作总结(4篇).doc
珠宝销售营业员个人工作总结范文(3篇).doc
五金建材购销合同范本(四篇).doc
精选高中寒假周记范文合集七篇.doc
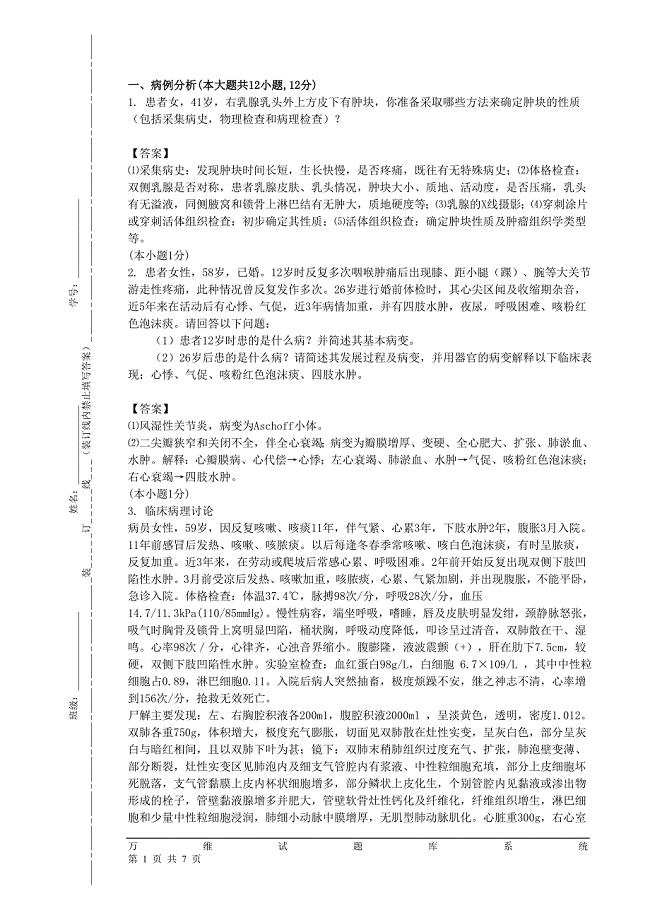
病例分析+论述+判断
急救药品物品管理制度(三篇)
2022关于安检的工作总结
UML大作业__网上购物系统设计
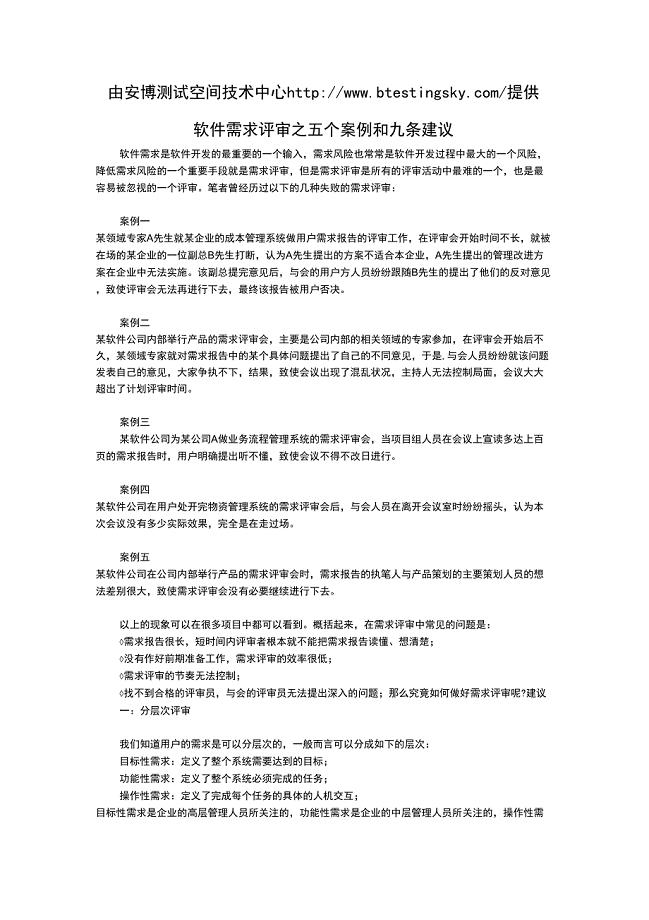
软件需求评审之五个案例和九条建议
班主任新学期工作计划标准范文(三篇).doc
6.21父亲节感恩教育2022活动总结3篇(感恩父亲节活动总结)
医古文B修正完整版
学校安全生产月活动方案范文
车间班长二月工作总结范文(2篇).doc
平顶山过滤分离设备项目申请报告【范文】
2023年公司庆祝三八妇女节活动方案合辑五篇 (精编)
东北财经大学21秋《金融学》在线作业三满分答案80

数字证书使用指南
乡镇民政办2019年度工作总结及2020年度工作计划.doc
影响我国旅游业发展的有关因素分析毕业论文1
 干部个人年终工作总结(2篇).doc
干部个人年终工作总结(2篇).doc
2023-07-21 7页
军训体会的作文
2023-09-11 13页
财务科2022年度工作总结与计划范文
2023-11-29 3页
设备维修人员的年度总结范文(二篇).doc
2022-10-27 4页
化学教师年终工作总结参考范本(二篇)
2024-02-27 5页
民航工程技术员工作总结(4篇).doc
2023-04-16 13页
质量管理制度48112669
2023-01-04 47页
做一个最好的你作文
2022-11-19 5页
珠宝销售营业员个人工作总结范文(3篇).doc
2023-04-04 7页
志愿者活动总结标准范文(2篇).doc
2022-10-30 4页