
船长航海学知识点
10页
1、航海学1. 海图比例尺: 海图比例尺为图上长度与其对应的地面实际长度之比; 一般在海图上标注的是普通比例尺或基准比例尺,大约是(其实不是这么算的)图上各局部比例尺的平 均值,或等于图上某点或某条线上的局部比例尺; 表示法:数字比例尺-直线比例尺- 墨卡托海图:A.比例尺是图上某基准纬线的局部比例尺或图外某基准纬线的局部比例尺,B. 同一点各个方向上的局部比例尺相等C. 同一纬线各点局部比例尺相同;D. C =C/COS (C为纬度处比例尺,C为纬度为0处比例尺)。或C /C =cos/COS(各 0 0 1 2 2 1 纬度处局部比例尺之比等于纬度余弦反比); 在同一纬度局部比例尺越大,同一图上相同两经线间间距越大; 同一图上,随纬度的升高,局部比例尺增大(纬度渐长率); 海图上最细的线0.1mm (即海图极限精度),海图比例尺越小,精度越低;比例尺越大,极限精度越高;2. 高程和水深 高程基准面:A. 中版:1985年高程基准面或当地平均海面B. 英版:平均大潮高潮面(半日潮地区),平均高高潮面(日潮地区),当地平均海面(无潮海区); 深度基准面(也是干出高度的起算面):A. 中版:
2、理论最低潮面;B. 英版:天文最低潮面; 无论是中版还是英版,灯高和桥净高都是从平均大潮高潮面(MHWS)起算; 平均海面是最基本的基准面,高程基准面和深度基准面都是以平均海面标注的; 咼程(和净空咼度同):A陆上的直接标数字,水上数字带括号;B. 米制单位米,拓制单位英尺;C. 不足10米,精确到0.1;大于10米,精确到整数; 水深:中版A.小于21米,标注至0.1m;B. 水深21-31米,标注0.5m,(即0.9,0.1,0.2,0.3归临近的整数,0.4-0.8归为0.5);大于31米, 标注至整数;C. 实测水用斜体字,直体字表示深度不准或采用旧水深资料或小比例尺海图英版:A.水深小于11拓,用拓和英尺表示;B. 水深大于11拓,用拓表示;C. 如果测量精确,11-15拓,也可用拓和英尺表示,大于15拓,用拓表示; 1拓1.83米; 底质:A. 先用形容词,再用底质;形容词小写,底质大写;B. 底质缩写;S(沙)、M (泥)、Cy(黏土)、Si(淤泥)、St(石头)、R (岩石)、Sh (贝)、Co(珊瑚)、Cb (鹅卵石)、G (砾)、Wd(海草);C. 形容词:so(软
3、)、sf (硬)、h (坚硬)、bk(碎);f(细)、m(中)、c (粗);D. 其中S.M.表示混合底质,沙多泥少(前多后少);E.其中S/M表示上层沙,下层泥;3. 误差均方误差、随机误差和标准差是一回事; 单个位置线的误差:A.方位位置线系统误差:工=(E b *D)/57.3;B.方位位置线标准差:E=(o*D)/57.3;C. 距离位置线系统误差:E=Eb; D.距离位置线的标准差:E=。; A.两方位定位系统误差:E=( E *d)/(57.3*sin 9 );B. 两方位定位标准差:E=(o* D2 + D2 )/(57.3*sin 9 );C. 物标选择:尽量选择明显、位置准确和离船较近的物标,即D尽可能小(孤立、显著、较近);兼顾系 统误差和随机误差,最好选择 60-90物标,一般夹角应满足 30-150(夹角不是越大越好)。D. 观测顺序:先难后易(先闪后定、先长后短、先弱后强),先慢后快;测锚位:先正横后首尾; 随机误差坐落在对称区间的概率:A.1倍。范围内:68. 3%; B.2倍。范围内:95.4%; C.3倍。范围内: 99.7%; 船位误差四边形:两条船位
4、线相交构成的四边形;A.船位落在一倍船位误差带概率:46.6%; B.船位落在两倍船位误差带概率:91.1%; C.船位落在三倍船位误差带概率:99.5%; D.船位误差圆:P=l-e心(c为标准差倍数,此种情况,误差圆必须过误差四边形的四个顶点,圆的半径即为c,带入公式即可。e=2.7183)E.船位误差椭圆:P=1-e-(c2)/2 (c为标准差倍数,此种情况椭圆必须内切四边形,其半径就是c,带入以上公 式即可)F. 习题:标准差为1,船位落在标准船位误差圆的概率63.2%-68.3%;落在标准误差椭圆的概率39.4% 误差种类;A.随机误差(均方误差,标准差):人为的,每次不一样,可通过增加观察次数减少;B. 系统误差:一直存在,每次大小方向都一样,但可以消除;C. 粗差:测错了,值偏大;D. 单一观测标准差:。= :(残差的平方和)/(n-1);E.误差传播定律:标准差3= 标准差1的平方+标准差2的平方;F. 最概率值的标准差=单一观测标准差A-n = f各残差平方和/n(n-1);G. 观测值-真值=真误差;最概率值:算数平均值;残差=观测值-最概率值;4. 三种误差圆的比
《船长航海学知识点》由会员M****1分享,可在线阅读,更多相关《船长航海学知识点》请在金锄头文库上搜索。
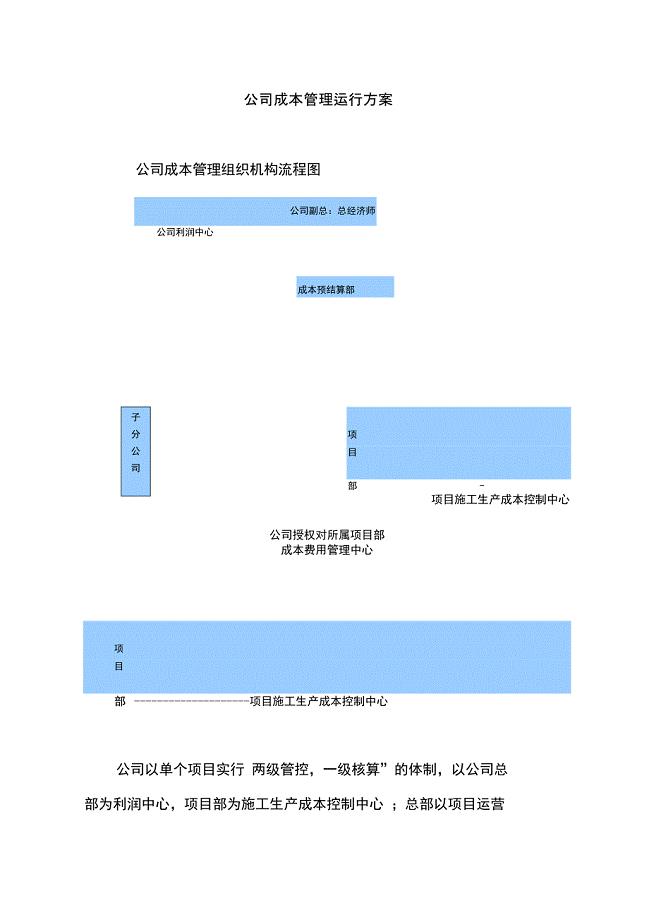
施工企业成本管理运行方案
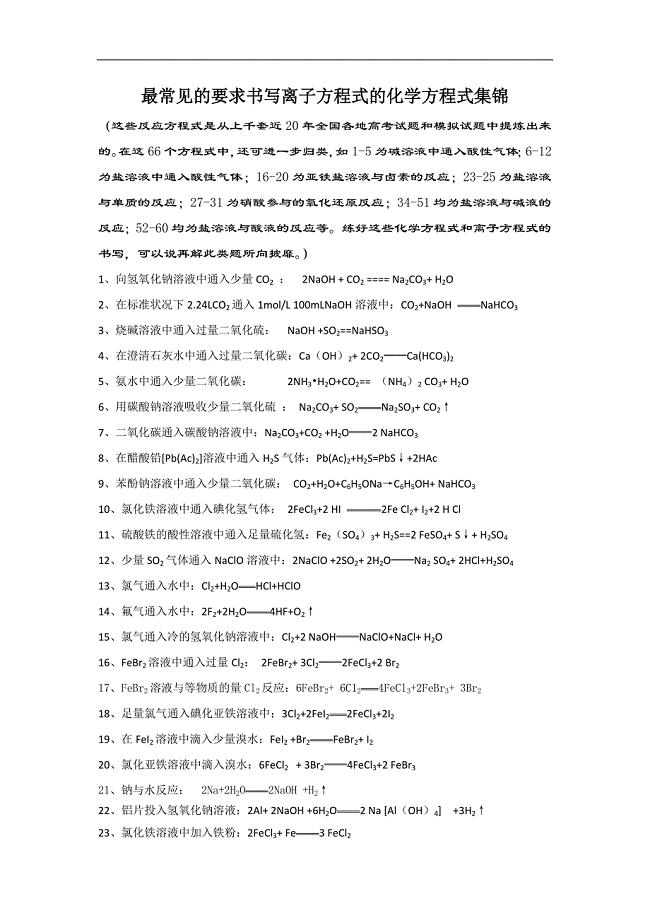
最常见的要求书写离子方程式的化学方程式集锦
阳极氧化铝基板项目商业计划书写作参考
合同及法律知识培训
月班主任工作总结精选版(3篇).doc
20XX南昌大学校长毕业典礼致辞
加强农业结构调整发展富民产业实施方案
农副产品批发市场建设项目可行性研究报告
2023年天津开学第一课一起向未来观后感最新(5篇)
水产品养殖订购合同电子版(三篇).doc
形势任务教育报告
jbpepe全国网络统考大学英语B英译汉
九级政治43实施可持续发展战略教案人教新课标版
2023年企业社会保险网上申报业务办理流程v1.3_企业社保网上申报流程
大学生创业课心得体会范文
Unit 8 Have you read Treasure Island yet?Section B (1a-1d) 教案
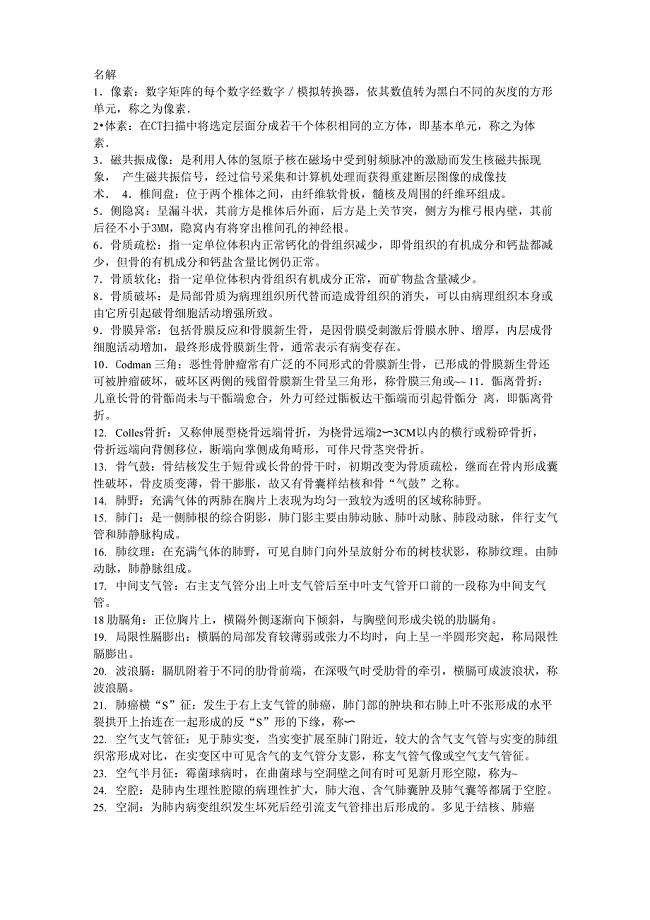
医学影像学名词解释问答题
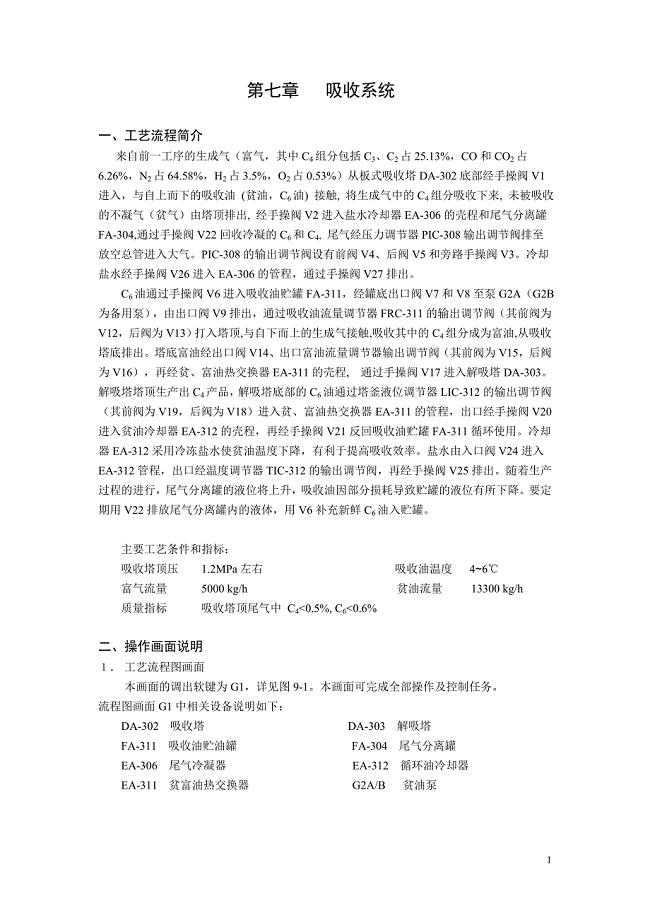
第七章 吸收系统
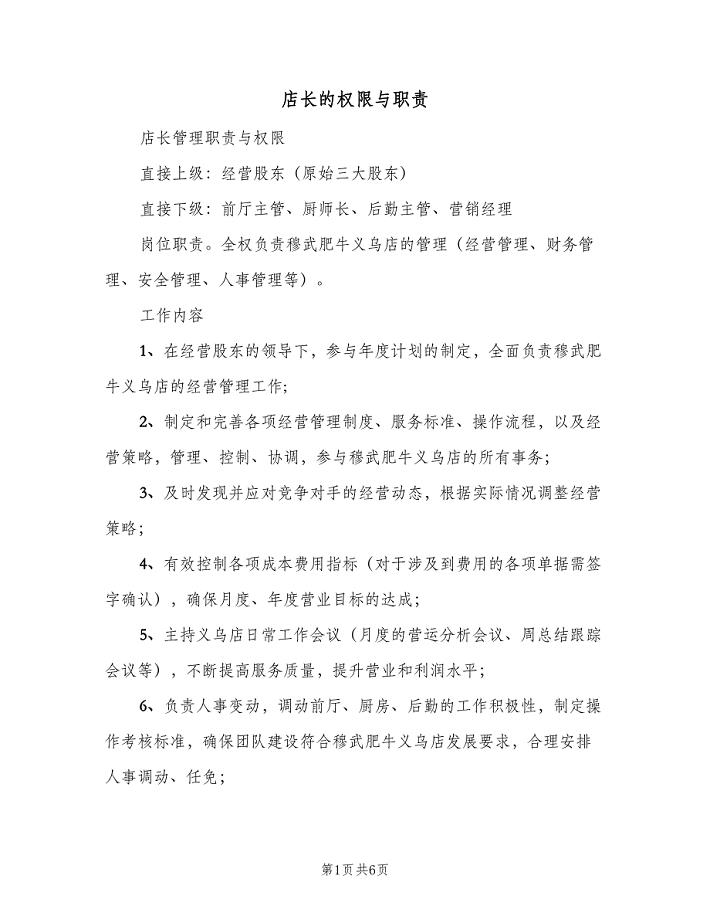
店长的权限与职责(2篇).doc
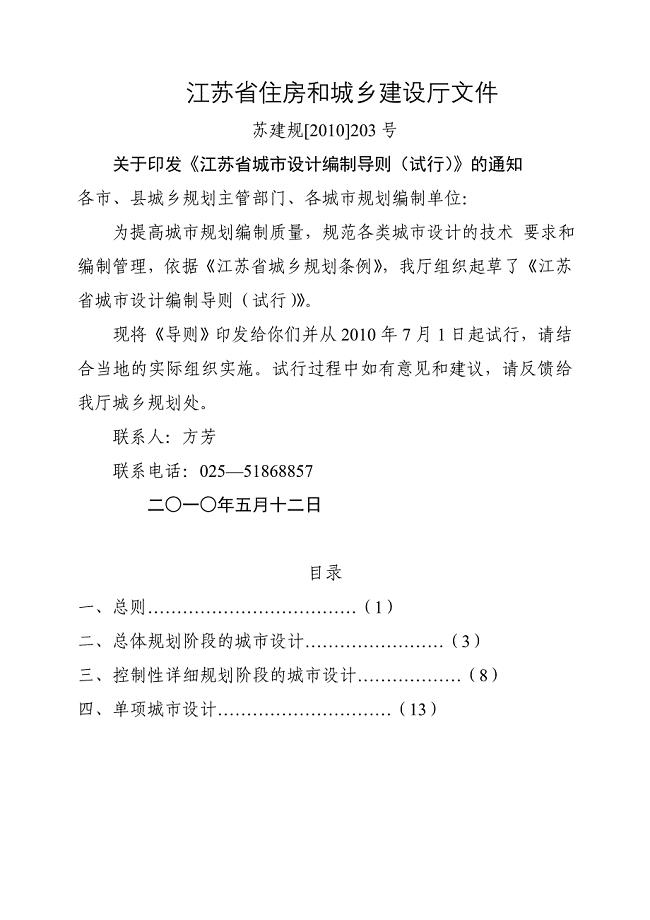
江苏省城市设计编制导则
 气硬性胶凝材料测试题
气硬性胶凝材料测试题
2023-10-05 32页
施工进度计划方案
2024-01-13 10页
洁净厂房防火
2023-08-06 10页
计量简答答案
2023-09-25 6页
LSC螺旋秤秤体说明书
2023-07-30 7页
IGBT的常识及使用注意事项
2023-06-01 6页
24带电粒子(带电体)在复合场中的运动(解析版)
2022-12-12 31页
新区手术室2022-2023学年护理实习生出科理论试卷
2023-08-04 32页
教学楼土方开挖施工方案
2022-11-11 13页
官方《影视导演基础》复习资料
2022-12-31 24页