
PWM波控制舵机原理
9页
1、2标准舵机舵机工作原理乘胜三模商城/ 2009-04-18掃礁的舵机育3冬导纯*分别足电谆纯、地嫂、控闾枝.如啊2两示令為源线咯地线GND控制线以日本FUT胡何3甜花机为例*图1色H1呐甜-S3DO3型筋机时内部电怖图】FUTABA - S3003型航机的内部电路3凹3HOL的匸作原理足;mi倍弓由接收讷道进入佶号辭澗电斟(B前日裁的圧髀迸f亍辭期 孫得一牛岚汎 偏邂巫压。电用与电观豁的电乐比较,茯禅电乐羞由BA66S8J该辎出送入赳机隔动集成业貉EAL阴冊*以瓏功业机止反转当业机转对时.通过缎联减速齿轮带剤电世器眈1庭转.血到电 濡盖均山 电机停止转幼舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的, 主要用途是控制在高速时候电机最大转速。原理是这样的:收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就 开始加速,马达就能产生EMF,这个和转速成正比的。因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生
2、倾 斜,就能检测出来。超过EMF判断电压时候就减小展宽,甚至关闭,让马达减 速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回 头,再靠近)。一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械 惯性就容易发生过冲现象,产生抖舵电源线和地线用于提供舵机内部的直流电机 和控制线路所需的能源.电压通常介于46V, 般取5V。注意,给舵机供电 电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信 号,方波脉冲信号的周期为20ms(即频率为50 Hz)。当方波的脉冲宽度改变时, 舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出 轴转角与输入信号的脉冲宽度之间的关系可用图3来表示。舵机输出轴转箱图3擁机输出转角与输入信号脉冲宽度的关系标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V-6V之间, 该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺 服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须 合理。控
3、制线输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间 通常在lms-2ms之间。而低电平时间应在5ms到20ms间,并不很严格。下表 表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位 置的关系:PffiJCXCKTFQ) FBI (T1) FBI (A1MMHT2)Pfrs商PAQ(ADCa)PJd (ADC9JPA3(ADC3J应 OCRPA5(ADC6)PA7(ALX;?|PDOCKXD)PO)CSCLPDJ CTXDPCI腕肋JDHIKTO)PCf (TCK)TO3(WnjPCI (THS)PTMCQCL 罚PC4 (TOO)FOSCOCUJKJ (TDDPWQOOKtiCTWCL)peicroffisjREEETvccAVC-CREEFZTALZGNDSTiLlGND.Y pi 总1J*5-|舵机工作原理1、概述舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节 发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制:1发动机进气量,来控制发动机的拉力(或推力);2副翼舵面(安装在飞机机翼后缘),用来
4、控制飞机的横滚运动;3水平尾舵面,用来控制飞机的俯仰角;4垂直尾舵面,用来控制飞机的偏航角;遥控器有四个通道,分别对应四个 舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。 舵机因此得名:控制舵面的伺服电机。不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来 控制尾舵,车模中用来转向等等。由此可见,凡是需要操作性动作时都可以用舵 机来实现。2、结构和控制一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈 电位计5k、直流电机、控制电路板等。工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲), 控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈 电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板 根据所在位置决定电机的转动方向和速度,从而达到目标停止。舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之 分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之 分,速度有快速和慢速之分,体积有大中小三
《PWM波控制舵机原理》由会员汽***分享,可在线阅读,更多相关《PWM波控制舵机原理》请在金锄头文库上搜索。
冀教版二年级数学下册期末检测卷及答案

关于车间主任的工作职责【7篇】
大树初中严防校园发生拥挤踩踏应急预案(五篇)

人力资源管理在网络培训中的应用
语言运用常见题型的解题方法
乳及乳制品标准推荐frgz
物流成本控制

课内阅读专题训练
塑钢型材项目建议书写作模板-代写定制
瘫痪老人怎样护理
建筑垃圾外运工程施工方案

商洛少儿图书策划项目申请报告(范文)

卫生监督体系建设自查报告
职业医师及助理医师--妇科知识讲义

个人借款抵押担保合同参考范本(八篇)
婚后协议书二
甘肃省白银市会宁县第四中学高二数学下学期期中试题含解析
中小学教育质量综合评价改革启动

XXX公司营销全套资料【设计营销管理制度、流程、表格
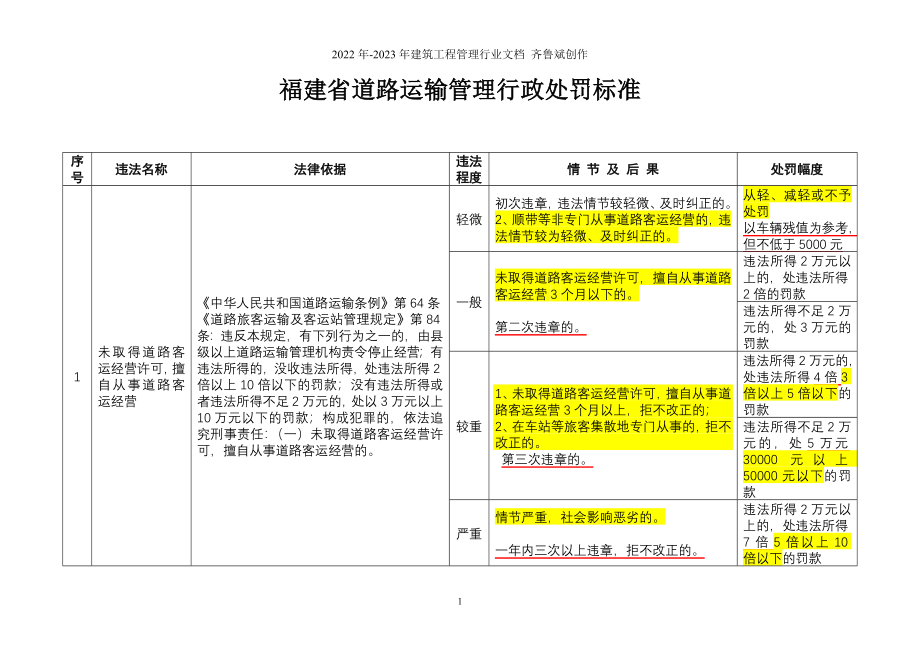
福建省道路运输管理行政处罚标准
 项目管理系统解决方案V
项目管理系统解决方案V
2023-02-19 15页
建筑工程施工工程概况及特点
2023-04-18 7页
【施工方案】虎门二桥气泡混合轻质土路基工程施工方案
2023-01-29 24页
环境监测人员持证上岗考试生物群落监测试题集
2023-04-25 18页
光合作用测试题
2023-10-23 8页
考研个人情况填写
2023-02-16 4页
XX仪控安装施工方案
2024-03-02 21页
主体结构钢筋技术交底记录文本
2022-10-19 8页
东台市妇幼保健院选址重建工程施工组织设计(DOC72页)
2024-01-25 72页
CAD全套键盘输入命令
2023-01-02 11页