
摄影测量知识点整理
7页
1、摄影测量学第一章绪论1、摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环 境和其他物体的几何、属性等可靠信息的工艺、科学与技术。2、摄影测量学的三个发展阶段:模拟摄影测量、解析摄影测量、数字摄影测量3、摄影测量三个发展阶段的特点:发展阶段原始资料投影方式仪器操作方式产品模拟摄影测量像片物理投影模拟测图仪作业员手工模拟产品解析摄影测量像片数字投影解析测图仪机助作业员模拟产品数字产品数字摄影测量数字化影像数字影像数字投影计算机自动化操作加作业员的干预数字产品模拟产品4、摄影测量存在哪些问题第二章单幅影像解析基础1、像主点:摄影机主光轴(摄影方向)与像平面的交点,称为像片主点。像主距:摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距(f)。2、航空摄影:利用安装在航摄飞机上的航摄仪,在空中以预定的飞行高度度沿着事先制定 好的航线飞行,按一定的时间间隔进行曝光摄影,获取整个测区的航摄像片。空中摄影采用竖直摄影方式,即摄影瞬间摄影机物镜主光轴近似与地面垂直。1 = L=fm L H(m一像片比例尺分母,f一摄影机主距,H一平均高程面的摄影高度H=mf)3、
2、相对航高是指摄影机物镜相对于某一基准面的高度,称为摄影航高。绝对航高是相对于平均海平面的航高,是指摄影机物镜在摄影瞬间的真实海拔高。通过 相对航高H与摄影地区地面平均高度H地计算得到:H =H+H地4、航空摄影与成图比例尺的关系比例尺类型航摄比例尺测图比例尺大比例尺1:2000 1:30001:5001:4000 1:60001:10001:8000 1:120001:2000中比例尺1:150001:200001:50001:100001:350001:10000小比例尺1:200001:300001:250001:350001:550001:500005、航向重叠:同一条航线内相邻像片之间的影像重叠称,重叠度一般要求在60%以上;旁向重叠:两相邻航带像片之间的影像重叠,重叠度要求在30%左右。6、中心投影:当投影会聚于一点时,称为中心投影;正射投影:投影射线与投影平面成正交。中心投影:投影射线会聚于一点(投影射线的会聚点称投影中心)投影 斜投影:投影射线与投影平面成斜交I平行投影,L正射投影:投影射线与投影平面成正交7、透视变换中的重要的点线面: 由投影中心作像片平面的垂线,交像面
3、于o,称为像主点;像主点在地面上的对应点以 O表示,称为地主点。 由摄影中心作铅垂线交像片平面于点n,称为像底点;此铅垂线交地面于点N,称为地 底点。 过铅垂线SnN和摄影方向SoO的铅垂面称为主垂面(W),主垂面即垂直于像平面P, 又垂直于地平面E,也垂直于两平面的交线透视轴TT。 合线加加与主纵线vv的交点i称为主合点。8、等角点的特性:在倾斜的航摄像片上和水平地面上,由等角点c和C所引出的一对透视 对应线无方向偏差,保持着方向角相等。9、摄影测量常用坐标系:像平面坐标系o-xy、像空间坐标系S-xyz、像空间辅助坐标系 S-XYZ、摄影测量坐标系A-XpYpZp、物空间坐标系O-XtYtZt10、内方位元素(框标坐标系一像空间坐标系)确定摄影机的镜头中心相对于影像位置关系的参数。内方位元素包括3个参数:像主点 相对于影像中心的位置x0,y0及镜头中心到影像面的垂距f;外方位元素(像空间坐标系一摄影测量坐标系)确定影像或摄影光束在摄影瞬间的空间位置和姿态的参数。外方位元素包括3个线元 素,用于描述摄影中心S相对于物方空间坐标系的位置Xs、Ys、Zs; 3个角元素,用于描 述影像面在
4、摄影瞬间的空中姿态。11、旋转变换:(1)含义:是指像空间坐标与像空间辅助坐标之间的变换。(2)方程:设像点a在像空间坐标系为(x,y,-f),而在像空辅坐标系中为(X,Y,Z),则二 者的正交变换为:X-x 一Y_ Ry_Z_ fa1b1aax 23bby23cc_ f _23c112、共线方程:在摄影成像过程中,摄影中心S、像点a及其对应的地面点A三点位于同一 条直线上。常见共线方程如下:_ fa( XXs) +(匕顶)+ c( ZZs)x x / 1110a 3( XA _ Xs) + b(YA _ Ys) + c 3( Z厂 Zs)Ifa.( XXs) + b,(匕s) + C 2(乞厂 Zs )/0a 3( XA _ Xs) + b(YA _ Ys) + c 3( ZA _ Zs)上式中,(x,y)为像点a在像平面直角坐标系中的坐标;(Xa,Ya,Za)为像点对应物点 A在地面坐标系中的坐标;(Xs,Ys,Zs)为投影中心、在地面坐标系中的坐标;ai、bi、ci 9 个方向余弦,其中含有三个外方位元素。13、共线方程的应用: 单像空间后方交会和多像空间前方交会 解析空中三角测
《摄影测量知识点整理》由会员re****.1分享,可在线阅读,更多相关《摄影测量知识点整理》请在金锄头文库上搜索。
作业设计 (2)

2018届九年级英语全册Unit6Whenwasitinvented第5课时当堂达标题新版人教新目标版
会计学实习报告【三】
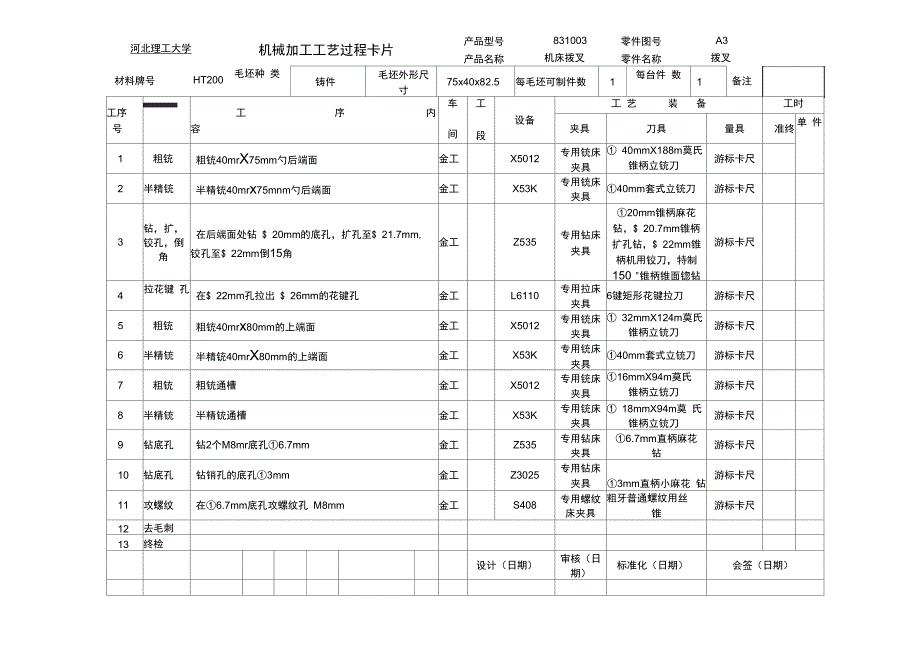
机械制造工艺学课程设计工艺过程卡

SAPBW配置及操作标准手册BW中文图文教程
利用物理课堂培养学生科学学习的素质
农民专业合作经济组织特征原则和作

《钢铁是怎样炼成的》名著资料
同学聚会方案2稿
水上交通宏观模拟软件需求规格说明
高一军训心得体会感想5篇
(完整版)小学奥数-比和比例(教师版)
挖机租赁合同协议书样本(6篇).doc
2022银行招聘考试(全能考点剖析)名师点拨卷含答案附答案92
2023三跳运动会加油稿

2010年1月18日七上期末复习讲义
人教版 高中数学 选修221.5.1曲边梯形的面积学案
信息安全考试 (2)
青岛版小学数学上册第一单元
柜台出租合同范文合集九篇
 清朝有哪些诗人
清朝有哪些诗人
2022-11-30 4页
抗心律失常药物
2022-09-21 7页
年人事部年终工作总结
2023-06-15 3页
IT项目变更管理流程说明书v10
2023-08-15 8页
耕地质量的概念和评价与管理对策0001
2023-11-22 3页
急诊科半年工作总结
2023-09-29 10页
例谈电场强度的求解方法概要
2022-12-17 5页
校企合作共建实训基地协议书完整版
2023-10-18 33页
不动产登记资料查询服务指南
2023-12-09 3页
2023年最新的企业管理创新的内容
2023-12-21 3页