
FANUC系统参数
13页
1、【转】FANUC 16系统参数大全2011-10-29 12:01转载自 regale最终编辑 regale700707设定范围099999999此参数设定从原点的距离,为利用参数来设定范围外边是禁止区,通常设定在机械的最大范围,当轴进入禁止区时会有一个过行程警报的显示。在检出操作中因会有变动,故应有多余的范围,有一原则,在米制情形时,在快速移动为1/5的多余之值,此值为设定范围708711为当自动坐标系统设定使用时,X,Y,Z和第4轴各轴原点坐标值的设定。设定范围:099999999735738设定X,Y,Z和第4轴第1原点和第2原点的距离。设定值:099999999753与754分别为X,Y,Z和第4轴的外部工件原点偏置量(设定值:0+或-7999)这是提供工件坐标系(G54G59)原点位置的参数之一,工件原点偏置量按不同坐标系而异,但此参数对所有工件坐标系给于共同的偏置量。一般以由机械来的输入(外部数据输入)自动设定755758:分列为X,Y,Z轴和第4轴的第1工件原点偏置量(G54)设定值:0+或-99999999759762:分列为X,Y,Z轴和第4轴的第2工件原点偏置量(G
2、55)设定值:0+或-99999999(并以此类推。)788796依序为F1位数指令中,F1F9的进给速度。设定值:015000MM/MIN804809:设定上述表示的行程界,设定值:0+或-99999999并以距离参考点的距离设定(参数24#4设定将禁止领域定义于外侧或内侧,设1为外侧)815818:依序在执行自动坐标系设定时,设定参考点的坐标值(输入系统为英制时,须使参数63#1=1)1000为X轴的螺距误差补正原点。设定值:012710011128为X轴的螺距误差补正量,设定值:0+或-72000为Y轴的螺距误差补正原点。设定值:012720012128为Y轴的螺距误差补正量,设定值:01+或-73000为Z轴的螺距误差补正原点。设定值:012730013128为Z轴的螺距误差补正量,设定值:0+或-74000等以此类推为第4轴。85008565为第5轴用数位伺服关系的参数86008665为第6轴用数位伺服关系的参数以此类推81008165为第1轴。8()00#1表示数位伺服关系的参数的标准值于电源开时:0:设定1:不设定设定马达形式后,此参数设定为0,则电源开时,符合参数8()
3、20的马达形式的标准自动设定于参数内,而且此参数变为18()01#0#5马达形式 脉波解码器1转的脉波数(P/R) #5 #4 #3 #2 #1 #02-0,1-0,0,5,10,20,20M,30,30R 2000 0 1 1 1 1 。 2500 0 1 1 0 1 0。 3000 0 1 0 0 0 14-0,3-0 2000 0 1 0 1 0 15-0 1000 0 1 0 0 0 02-0,1-0,0,5,10,20,20M,30,30R 12500 0 0 0 0 0 1。 20000 1 1 1 1 1 1。 25000 1 1 1 0 1 08()02#3设1#4设08()04此参数于电源开时,自动设定为标准值,但必须使8()00#1设08()20设定马达形式。设定范围:132767。NC的记忆器内有各马达形式的数位伺服关系的标准值,经由本参数则可设定所要的资料。各轴分别设定。此参数为0以下或设定未登记的马达形式,则产生警示资料号码 马达形式 5-0 4-0 3-0 2-0 1-0 0 5 10 20M 20 30 30R8()20 3 4 5 6 7 8 9 10
4、11 12 13 148()21:负载惯量比(设定范围:132767使用数位伺服时,负载和马达转子的惯量比可用下式计算,而分别设定于各轴负载惯量负载惯量比=乘以256转子惯量8()22马达旋转方向的设定:111:正方向 -111:负方向8()23:数位伺服关系(PULCO) 资料范围:132767使用数位伺服时,各轴分别设定马达1转时,速度回馈用检出器的脉波数。脉波数以A相。B相的脉波1周期有4脉波计算8()24:数位伺服关系(PULS)资料范围:132767使用数位伺服时,各轴分别设定马达1转时,速度回馈用检出器的脉波数。脉波数以A相。B相的脉波1周期有4脉波计算。(例:2000P/R的脉波解码器时,2000与4相乘=8000)8()408()65;数位伺服关系的参数(注:PRM8()00#1(DGRPM)=0,PRM8()20中输入马达形式时,则此参数于电源开时,自动设定为标准值。通常不须变更依使用马达型号而决定的参数资料号码 适用的AC伺 马达 5-0 4-0 3-0 2-0 1-0 08()40 241 460 669 322 469 8288()41 -527 -1461 -
《FANUC系统参数》由会员cn****1分享,可在线阅读,更多相关《FANUC系统参数》请在金锄头文库上搜索。
借助媒体教学启发学生心智
福建师范大学21秋《通信原理》在线作业一答案参考55
一次管网温降及失水分析
惠州市2013届高三第三次调研考试
铝锭和铝棒项目商业计划书写作模板
小班美术教师工作计划五篇
急救知识与应急演练记录
公司春节联欢会朗诵辞礼仪主持
小学生的作文
国旗下讲话-只争朝夕不负韶华
地大21秋《证券投资学》复习考核试题库答案参考套卷6
教研组工作计划九篇
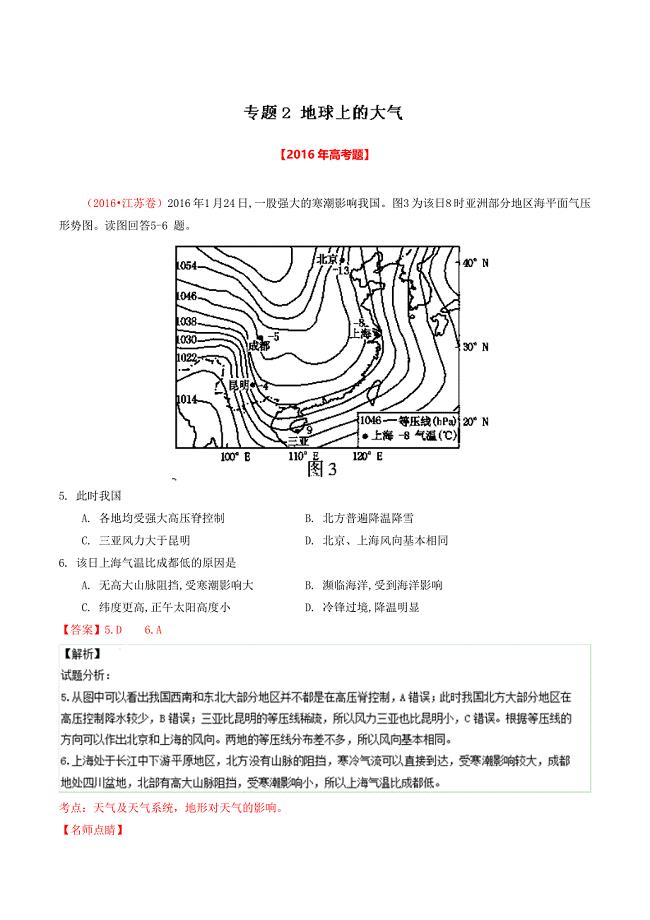
高考地理真题分类汇编:专题02地球上的大气Word版含解析
输血与血型
玻璃窑炉节能改造项目可行性研究分析报告
施工电梯生产安全事故应急救援预案
菏泽市数字化城市管理系统升级项目
三年级上册语文期末复习计划
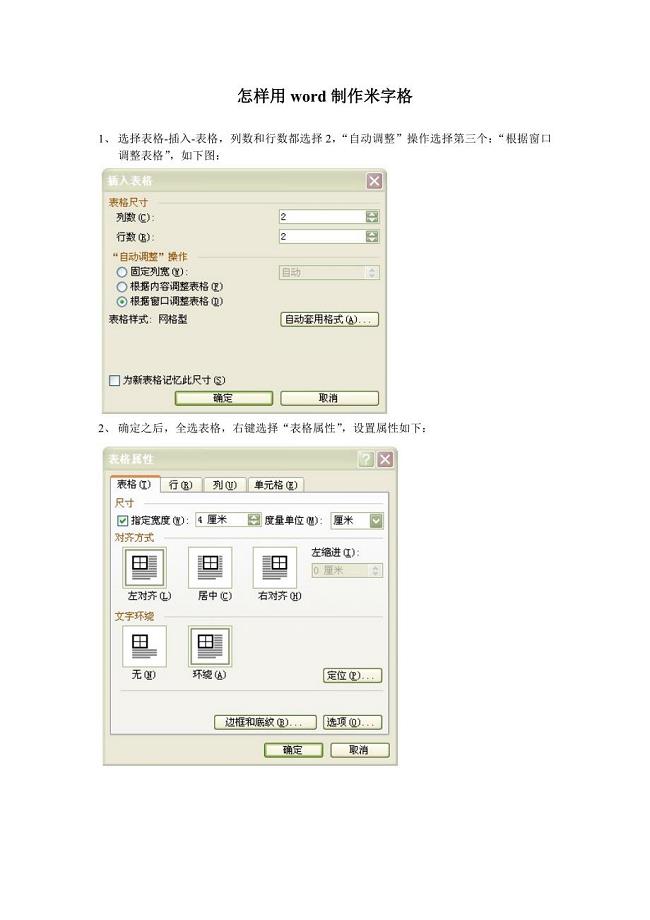
怎样用word制作米字格
2022养老院年终总结范本
 中小小一粒米班主题活动教案模板
中小小一粒米班主题活动教案模板
2023-02-16 9页
某市福利院建设项目可行性研究报告 (2).doc
2023-09-17 53页
matlab在机械控制中的应用
2023-10-16 8页
上半年(第41次)全国计算机等级考试(ncre)
2023-11-30 7页
美的集团股份有限公司财务分析.doc
2023-01-09 21页
商场商户装修手册
2022-10-02 45页
异戊烯产品项目可行性研究报告【申请备案】
2023-10-18 109页
山谷蓝&泰科曼贸易公司VIP高级客户经理职位说明书
2022-08-11 5页
康佳通信特约服务站资料更改通知书
2023-04-07 3页
吴鸿飞计算机网络技术网络管理方向专科毕业设计aaa.doc
2022-08-13 6页