
自动化专业移动机器人实验报告
23页
1、移动机器人综合实验实验报告姓名: 程光敏 许艺 丁蓉 学号: 0901510312, 0906840207, 0910200101 南京理工大学自动化学院目 录实验一 机器人U-II测试.2实验二 机器人传感器实验.8实验三 机器人运动控制实验.15实验四 机器人避障实验.20实验一 机器人U-II测试 一. 实验目的 1、熟悉AS-UII机器人的组成结构和工作原理;2、熟练操作使用AS-UII机器人;3、掌握AS-UII机器人各项基本功能。二. 设备清单每组学生拥有一套机器人实验课程专用套件。上课期间由组长保管,上课期间遗失或损坏的器件须按原价赔偿。(1) AS-UII智能机器人 1台(2) 五金工具 1套(3) 万用表 1只(4) AS-UII使用手册 1本(5) 使用手册 1本(6) VJC1.5安装盘 1张三、课堂要求(1) 课前认真预习,精心准备。(2) 在不损坏器件或愿意赔偿的情况下自由使用器件。(3) 不同小组的器件不要混用。(4) 课后整理桌面。(5) 不在课堂做任何与学习无关的事。(6) 课后认真填写实验报告。四、注意事项(1) 运行前充饱电,能使机器人运行效果更好。
2、(2) 轻拿轻放机器人,防止摔落地面。(3) 碰撞环是机器人最易损坏的部件,请注意保护。使用机器人时,尽量避免提持、拉扯、捧托碰撞环。(4) 没有特殊情况,不要拆卸电池。如果确实要拆卸,应按住电池上的小塑料片,使之贴住池身,以脱离卡槽,然后轻轻拔下来。(5) 串口通信线连接在机器人上时,最好不要按复位键。否则容易死机。(6) 机器人运动时,勿顶住障碍物,否则易造成电机堵转,烧毁芯片。(7) 常见问题的处理,参见AS-UII使用手册附录。五、系统检测按下机器人的运行键,机器人开始自检,LCD 液晶屏上显示“AS-UII Inteligent Robot Test”:1、检查LCD 液晶屏LCD 液晶显示屏安装在机器人的外壳上,用于显示各种信息,便于了解程序执行中的情况。显示屏可以显示162 个字符(每行16 个字符,共2 行)。显示屏可以显示机器人运行的信息,这一点在以后调试程序时尤其显得重要。自检开始后,LCD 显示屏标明的测试项目为“Now Test NO.1”,接着提示“LCD Test”,然后就开始显示字符,如数字、符号、字母等。注意观察LCD 显示屏有没有出现黑屏(出现整排兰色
《自动化专业移动机器人实验报告》由会员re****.1分享,可在线阅读,更多相关《自动化专业移动机器人实验报告》请在金锄头文库上搜索。
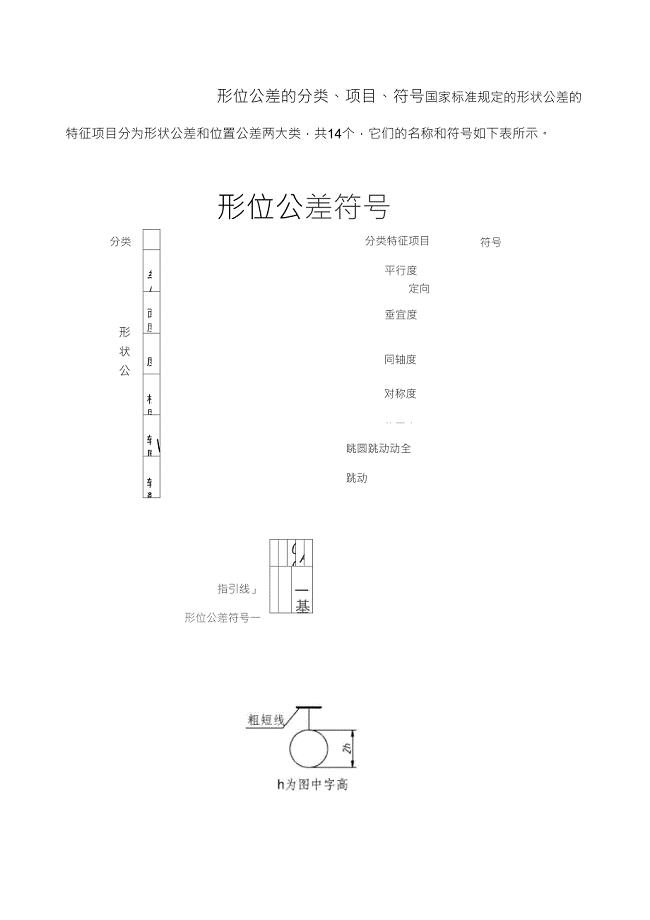
常用形位公差的分类、项目、符号
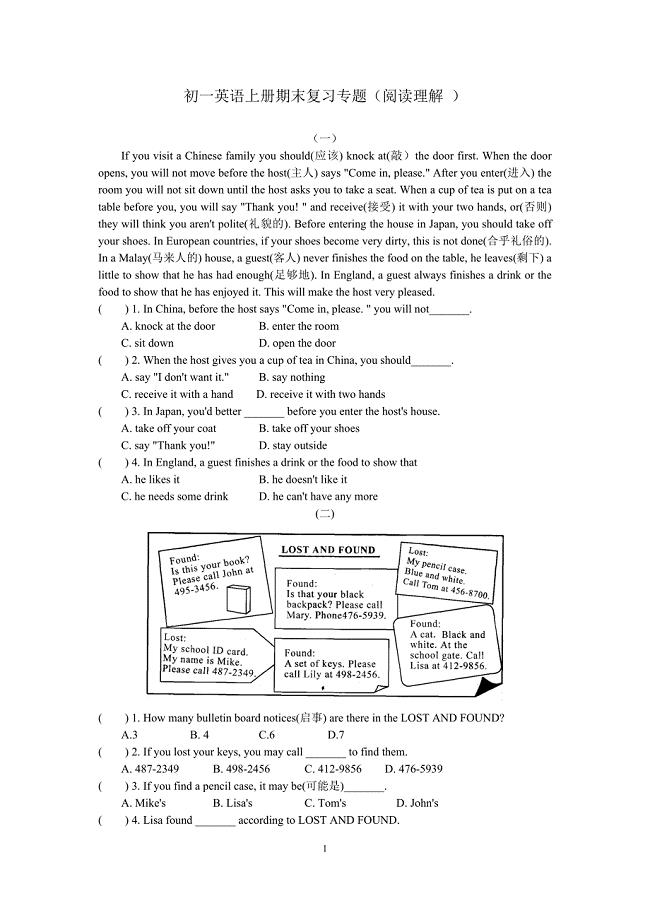
牛津译林版初一英语上册期末复习专题阅读理解
进口货物运输代理协议官方版(九篇).doc
20xx年汽车电器的相关实习总结
静电的产生及预防措施
在大海中永生2
可爱的小金鱼五年级作文600字
贝莱特水源热泵空调保养说明书
农业现代化庄园地产的开发模式
演讲比赛活动方案(5篇).doc
依法治国演讲稿
大连理工大学21秋《财务管理》学平时作业2-001答案参考24
观察物体
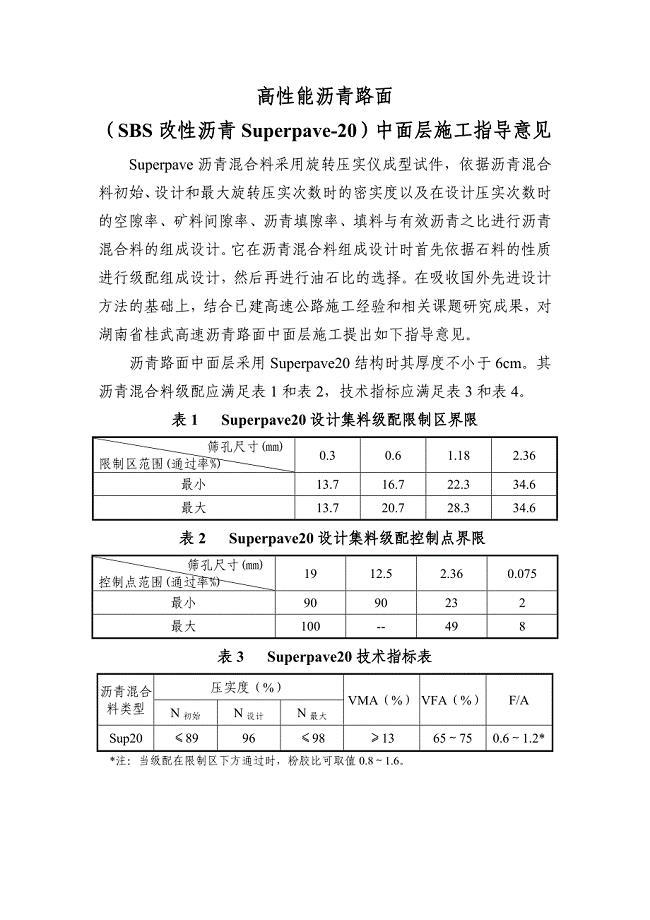
沥青路面中面层Sup20施工指导意见
家具加盟合同七篇.doc
2023年会计个人述职报告(3篇)
2016社区基层党建工作计划ppt报告
蚁群算法在路径优化中的应用3改
财务会计知识
![火锅特许加盟合同书[精品]](https://union.152files.goldhoe.com/2024-2/2/1546cfcf-ff97-4a40-a2ee-b97a3952e419/pic1.jpg)
火锅特许加盟合同书[精品]
 关于苏教版三年级上册数学教案教学
关于苏教版三年级上册数学教案教学
2023-03-25 10页
寒假社会实践报告最新
2023-01-14 20页
读书类的名人名言大全.doc
2023-06-15 60页
2022关于工作疏忽检讨书
2023-05-06 8页
苏教版初中劳动技术《合理早餐的设计与制作》教学设计
2023-08-26 9页
化妆品促销活动方案.doc
2022-09-13 32页
辽宁省锦州市2016—2017学年八年级上期中考试英语试卷含答案
2023-02-19 10页
大年三十守岁的作文除夕守岁优秀作文5篇
2023-07-13 8页
(word版)2022年关于早恋检讨书
2023-09-05 24页
德国莱茵河治理一期工程投标文件2
2023-08-02 133页