
晶闸管双闭环不可逆直流调速系统设计
18页
1、 目 录第一章 绪论1第二章 主电路结构选择22.1 变压器参数计算3第三章 双闭环直流调速系统设计43.1电流调节器的设计63.2 转速调节器的设计9第四章 触发电路的选择与原理图13第五章 直流调速系统MATLAB仿真15第六章 总结17第七章 参考文献17第一章 绪论转速负反馈控制直流调速系统(简称单闭环调速系统)调节器的单闭环转速系统可以实现转速调节无静差,消除负载转矩扰动对稳态转速的影响,并用电流截止负反馈限制电枢电流的冲击,避免出现过电流现象。但转速单闭环系统并不能充分按照理想要求控制电流(或电磁转矩)的动态过程。 对于经常正、反转运行的调速系统,缩短起、制动过程的时间是提高生产率的重要因素。在起动(或制动)过渡过程中,希望始终保持电流(电磁转矩)为允许的最大值,使调速系统以最大的加(减)速度运行。当到达稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。这类理想启动过程示意下图1所示。图1 单闭环调速系统理想启动过程启动电流呈矩形波,转速按线性增长。这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动(制动)过程。 下面我们引入了一种
2、双闭环系统来对控制系统进行优化。第二章 主电路结构选择目前具有多种整流电路,但从有效降低脉动电流保证电流连续和电动机额定参数的情况出发本设计选用三相桥式全控整流电路,其原理如图2-1所示,习惯将其中阴极连接在一起到3个晶闸管()称为共阴极;阳极连接在一起的3个晶闸管()称为共阳极,另外通常习惯晶闸管从1至6的顺序导通,为此将晶闸管按图示的顺序编号,即共阴极组中与a,b,c三相电源相接的3个晶体管分别是,共阳极组中与a,b,c三相电源相接的3个晶闸管分别是。 图2-1 三相桥式全控整流电路原理图 其工作特点为:1)每个时刻均需2个晶闸管同时导通,形成向负载供电的回路,其中1个晶闸管是共阴极组的,1个是共阳极组的,且不能为同一相的晶闸管。2)6个晶闸管的触发脉冲按的顺序相为、位依次相差;共阴极组的脉冲依次差,共阳极组也依次差;同一相的上下两个桥臂即与,与,与脉冲相差。3)整流输出电压一周期脉动6次,每次脉动的波形都一样。4)在整流电路合闸启动过程中或电流断续时,为保证电路的正常工作,需保证同时导通的2个晶闸管均有触发脉冲。2.1 变压器参数计算 由于整流输出电压的波形在一周期内脉动6次的波
3、形相同,因此在计算时只需对一个脉冲进行计算。由此得整流输出平均电压 () 显然=440V,如果忽略晶闸管和电抗器的压降,则可以求得变压器副边输出定的冷却状态下,稳定结温不超过额定结温是允许流过的最大工频正弦半波电流的平均值。因此在使用时同样应按照实际波形的电流与通态平均电流所造成的发热效应相等,即有效值相等的原则来选取晶闸管的电流定额,并留有一定裕量。一般取其通态平均电流为此原则所得计算结果的1.5-2倍。可按下式计算: =(1.52),式中计算系数=/1.57由整流电路型式而定,为波形系数,为共阴极或共阳极电路的支路数。当时,三相全控桥电路=0.368故计算的晶闸管额定电流为=(1.52) 0.368(2201.5)=182.16242.88A,取200A。第三章 双闭环直流调速系统设计 双闭环直流调速系统控制原理图如图3.1所示速度调节器根据转速给定电压和速度反馈电压的偏差进行调节,其输出是电流的给定电压(对于直流电动机来说,控制电枢电流就是控制电磁转矩,相应的可以调速)。电流调节器根据电流给定电压和电流反馈电压的偏差进行调节,其输出是功率变换器件(三相整流装置)的的控制信号。通过
4、电压进而调节镇流装置的输出,即电机的电枢电压,由于转速不能突变,电枢电压改变后,电枢电流跟着发生变化,相应的电磁转矩也跟着变化,由,只要与不相等那么转速n会相应的变化。整个过程到电枢电流产生的转矩与负载转矩达到平衡,n不变后,达到稳定。 图3.1 双闭环直流调速系统电路原理图 在双闭环直流调速系统中,转速和电流调节器的结构选择与参数设计须从动态校正的需要来解决。如果采用单闭环中的伯德图设计串联校正装置的方法设计双闭环调速系统这样每次都需要先求出该闭环的原始系统开环对数频率特性,在根据性能指标确定校正后系统的预期特性,经过反复调试才能确定调节器的特性,从而选定其结构并计算参数但是这样计算会比较麻烦。所以本设计采用工程设计方法:先确定调节器的结构,以确保系统稳定,同时满足所需的稳定精度。再选择调节器的参数,以满足动态性能指标的要求。这样做,就把稳,准,快和抗干扰之间相互交叉的矛盾问题分成两步来解决,第一步先解决主要矛盾,即动态稳定性和稳定精度,然后再进一步满足其他动态性能指标。 按照“先内环后外环” 的一般系统设计原则,从内环开始,逐步向外扩展。在这里,首先设计电流调节器,然后把整个电流环
《晶闸管双闭环不可逆直流调速系统设计》由会员ni****g分享,可在线阅读,更多相关《晶闸管双闭环不可逆直流调速系统设计》请在金锄头文库上搜索。

2019年保育员技师提升训练试题B卷含答案
技术员工作总结_1
水处理器材项目创业计划书写作模板

员关系转出介绍信

中学生感恩教师演讲稿十篇
大学生毕业演讲稿英语
三年级语文绝招知识点
二级建造师机电工程考试历年真题汇总含答案参考81
物理变阻器说课稿
小学学校心理健康计划范本(4篇)
弱电系统用户需求书
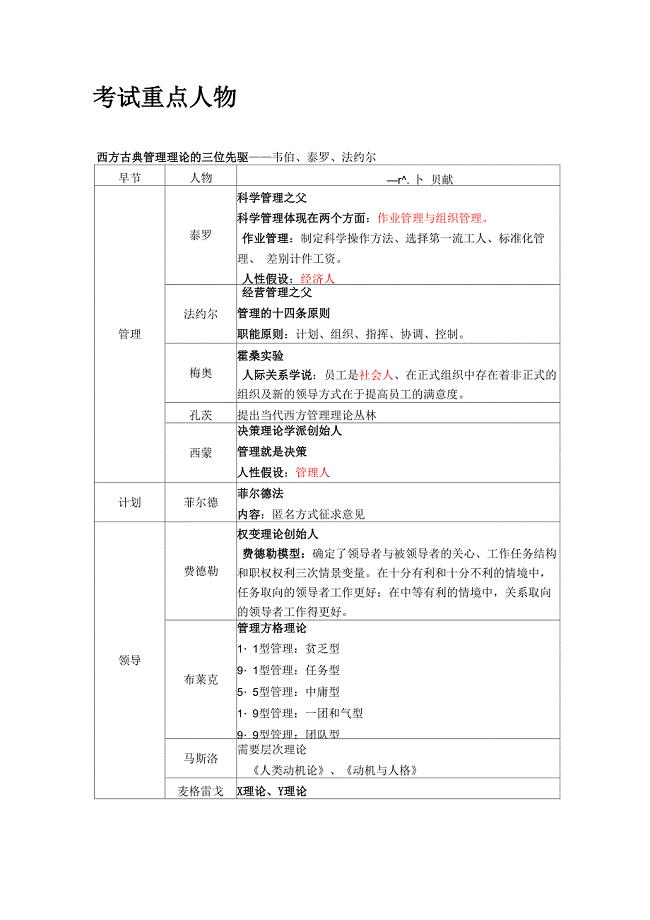
管理学主要人物
一常用的表达方式和表现手法
出纳会计岗位职责(九篇)
无子女无财产的离婚协议书标准范本(八篇)
2023年酒店消防责任书(6篇)
读《文化苦旅》心得体会读文化苦旅
2022年信息科个人年度工作总结
关于农村实用人才的调研报告
事业单位考试法律法规资料:银行业监督管理法(含答案)
 某停车场监控系统设计方案
某停车场监控系统设计方案
2022-09-17 45页
C和网络面试问题分类
2024-01-25 3页
excel排序和筛选操作方法
2022-12-18 2页
linux(RedHat)网卡数据的配置方法
2023-04-10 5页
Photoshop中的CMYK设置
2024-01-31 7页
excel单元格地址
2022-10-21 8页
景观设计师考试快题任务书
2022-10-15 1页
成控部管理制度
2022-09-24 5页
住宅楼地下车库人防工程施工组织方案
2022-08-23 151页
辽宁成大健康产业基地生物保健品SOD生产区建设项目可行性研究报告
2022-10-28 66页