
机械手总体结构的类型
5页
1、7075硬铝!工业机器人铝合金铸件机械手的设计要求 机械手总体结构的类型 工业机器人的结构形式主要有直角坐标结构,圆柱坐标结构,球坐标结构,关节型结构四种。各结构形式及其相应的特点,分别介绍如下。 1.直角坐标机器人结构 直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的.由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到很高的位置精度(m级)。但是,这种直角坐标机器人的运动空间相对机器人的结构尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机器人的结构尺寸要比其他类型的机器人的结构尺寸大得多。 直角坐标机器人的工作空间为一空间长方体。直角坐标机器人主要用于装配作业及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构。 2.圆柱坐标机器人结构 圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是一个圆柱状的空间。 3. 球坐标机器人结构 球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工作
2、空间是一个类球形的空间。 4. 关节型机器人结构 关节型机器人的空间运动是由三个回转运动实现的。关节型机器人动作灵活,结构紧凑,占地面积小。相对机器人本体尺寸,其工作空间比较大。此种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这种类型的机器人。 手臂的设计要求 机器人手臂的作用,是在一定的载荷和一定的速度下,实现在机器人所要求的工作空间内的运动。在进行机器人手臂设计时,要遵循下述原则; 1.应尽可能使机器人手臂各关节轴相互平行;相互垂直的轴应尽可能相交于一点,这样可以使机器人运动学正逆运算简化,有利于机器人的控制。 2.机器人手臂的结构尺寸应满足机器人工作空间的要求。工作空间的形状和大小与机器人手臂的长度,手臂关节的转动范围有密切的关系。但机器人手臂末端工作空间并没有考虑机器人手腕的空间姿态要求,如果对机器人手腕的姿态提出具体的要求,则其手臂末端可实现的空间要小于上述没有考虑手腕姿态的工作空间。 3.为了提高机器人的运动速度与控制精度,应在保证机器人手臂有足够强度和刚度的条件下,尽可能在结构上、材料上设法减轻手臂的重量。力求选用高强度的轻质材料,通常选用高强度
3、铝合金制造机器人手臂。目前,在国外,也在研究用碳纤维复合材料制造机器人手臂。碳纤维复合材料抗拉强度高,抗振性好,比重小(其比重相当于钢的1/4,相当于铝合金的2/3),但是,其价格昂贵,且在 性能稳定性及制造复杂形状工件的工艺上尚存在问题,故还未能在生产实际中推广应用。目前比较有效的办法是用有限元法进行机器人手臂结构的优化设计。在保证所需强度与刚度的情况下,减轻机器人手臂的重量。 4.机器人各关节的轴承间隙要尽可能小,以减小机械间隙所造成的运动误差。因此,各关节都应有工作可靠、便于调整的轴承间隙调整机构。 5.机器人的手臂相对其关节回转轴应尽可能在重量上平衡,这对减小电机负载和提高机器人手臂运动的响应速度是非常有利的。在设计机器人的手臂时,应尽可能利用在机器人上安装的机电元器件与装置的重量来减小机器人手臂的不平衡重量,必要时还要设计平衡机构来平衡手臂残余的不平衡重量。 6.机器人手臂在结构上要考虑各关节的限位开关和具有一定缓冲能力的机械限位块,以及驱动装置,传动机构及其它元件的安装。 腰座结构的设计要求 工业机器人腰座,就是圆柱坐标机器人,球坐标机器人及关节 型机器人的回转基座。它是机
《机械手总体结构的类型》由会员cl****1分享,可在线阅读,更多相关《机械手总体结构的类型》请在金锄头文库上搜索。
学校学期综治维稳工作总结
美丽的大自然作文400字
2023年吉林省长春市农安县高家店镇永安堡村社区工作人员考试模拟题含答案
视觉分割原理
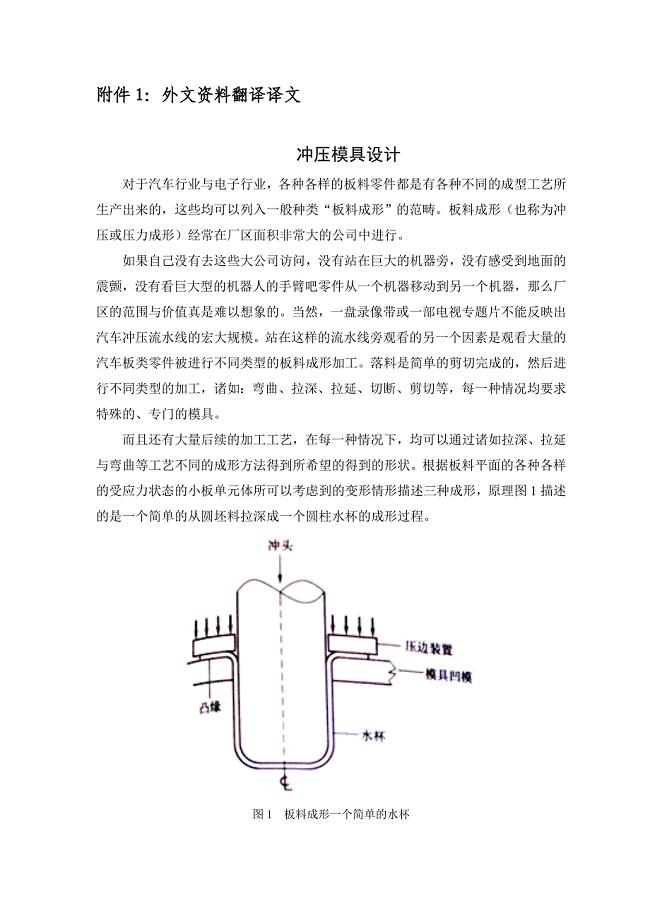
冲压类外文翻译、中英文翻译冲压模具设计
广告策划
2023年终个人总结模板(三篇).doc
2021年大学生暑假实习总结范文:服装厂打工实习
三年级品社上册第四单元
项目合作合同汇总8篇
技能比赛内容及相关要求
家长会教师发言材料
人教版小学数学四年级下册期中测试题附答案
学生综合素质自我评价材料
2021年在解放思想座谈会上发言

实验交换机的Telnet远程登陆配置骄阳教育
嘉兴啤酒分发设备项目可行性研究报告
小学语文新课标
关于社团活动总结锦集9篇
Fun time&Cartoon time10
 计算机网络技术展望
计算机网络技术展望
2023-04-19 4页
编程求解一元四次方程
2022-07-14 7页
用Maven创建web项目(具体步骤)
2023-11-18 10页
计算机房国家规范
2023-12-22 12页
实验2电机控制实验-单机版
2023-05-11 5页
EM78系列单片机的开发工具及编程器
2023-07-28 19页
动态JSP页生成静态HTML代码
2023-01-19 4页
有线电视网络企业营改增该课程
2023-08-08 15页
domino分区服务器原理及其配置和管理
2023-01-23 15页
华为USG配置命令大全
2022-12-01 11页