
第十三章工业机器人机构学
67页
1、第十三章工业机器人机构学介绍,业机器人的组成原理、分类与工作性能特点。研处坐标变换与空间物体的位姿与位移的齐次坐标表达;研处了已知各个关节的相对运动时,如何确定工业机器人末端操作器的位姿:研尤已知目标对象的位姿时,如何确定工业机器人各个关节的相对运动go13,1概述工4k机器人罡用来搬运材料、零件与工具进行焊接与IS涂的可再S的多功能机械手,通过调用不同的程序来完成预设的多种工作任务.13.2工业机器人的组成工4k机器人由三大部分六个子系统组成三大部分是机械部分、传感部分和控制部分六个系统是驱动系统、机构与结构系统、感觉系统.机器人与环境交互系统、人机交互系统和控制系统1.机器人的机构与结构系统工业机器人的机械部分由三部分姐成即机身、手臂和末端操作器机男可以是S走的也可以是移动的手臂进一步划分为上臀和下上胃与机身形成肩关节,上青与下臂形成肘关节下譬与末端操作器形成碗关节,如SI33所示图13.3机器人的机构与结构2.机器人手部的机构与结构系统1)具有个相对自由度的末端操作器2)具有多个自由度的末端操作器13.3工业机S人的分类与性能I)直角坐标型亶角坐标型操作机如SI3.6所示它有三个
2、移动关节(PPP)可使末端操作器作三个方向的独立位移该种型式的工业机器人.走位精度较,空间轨迹规划与求解相对较容易,计算机控制相对较简单它的不足是空间尺寸较大,运动的站驰相文寸较差,运动的iSS相对幽氐.末端操作器2)19柱坐标型恻柱坐标型操作机如图】3.7所示,它有两个移动关节和一个转动关节(PPR).末端操作器的安装轴线之位姿由(2GO)坐标予以表示。该种型式的【业机器人.空间尺寸较小,工作范圉较大,末端操作器可获得较商的运动速度。它的缺点是末端操作器离Z轴愈远,其切向线位移的分辨精度就愈低。3)球坐标型球坐标型操作机如图13.8所示,它右两个转动关节和一个移动关节(RRP),末端操作器的安装轴线之位姿由(&Gr)坐标予以表示。该种型式的工业机器人,空间尺寸校小,工作范ra较大-z4)关节型关节操作机如图】3.9所示沱有三个转动关节(RRR),即机身上部相对于下部的转动ey。,肩关节的转动0Z1和肘关节的转动ezz.腕关节的转动0Z3属于末端操作器的自由度该种结构的匚业机器人,空间尺寸相对较小匚作范制相对校大,还可以绕过机座周用的障碍物,是目前应用较多的一种机空.谐波减速器图139
3、关节型操作机13.4工业机器人的运动学基础I:业机器人是由若干个关节所联系起办的一种开链.其一端固结在机座上,另一端安装有末端操作器。确宦I:业机器人末端操作器安装轴线的方位,确定末端操作器的位姿与位移确定1:业机器人的操作对象,即目标物休的位姿与位移,构成I:业机器人运动学基础应该研就的一部分I:作。1X44目标物体的空问转动矩阵一个通过坐标原点的矢SVI绕通时坐标原点的笊位矢fiu转动(P角到达V2要求确定V2的位姿。为了确宦矢aV1绕通过坐标原点的爪位矢虽U转动(P角到达V2的位姿,将它作如下转动。目标物体的空间转动I)平面内巾位矢量绕坐标轴的转动矩阵U; =l/xcosa-s sineA AJrLCLCCOS&H-sill d Ur COS&Uy图15.4F01平面内单位矢量绕坐标轴的转动2)空间内爪位矢fi绕坐标轴的转动矩阵R/ =MM=1 00 cos/0 sill YCOSO0-sin Pcosy - sine00 -sin 7 cos 70 sin p1 00 cos/-sin (p 0COSO 00 1(13.2)图13.4F02空间内单铉矢量绕坐标轴线的传动4)(1
《第十三章工业机器人机构学》由会员人***分享,可在线阅读,更多相关《第十三章工业机器人机构学》请在金锄头文库上搜索。
2023年课题年度执行情况报告
2022初级经济师-初级经济师工商管理考试全真模拟卷42(附答案带详解)
说好普通话写好规范字
山东省八年级地理上册4.2农业学案1无答案新版新人教版
市卫生局卫生监督所学校饮用水污染应急演练
房地产评价中最高最佳使用分析
上市公司年度审计报告模板

15《诗人谈诗》表格教案
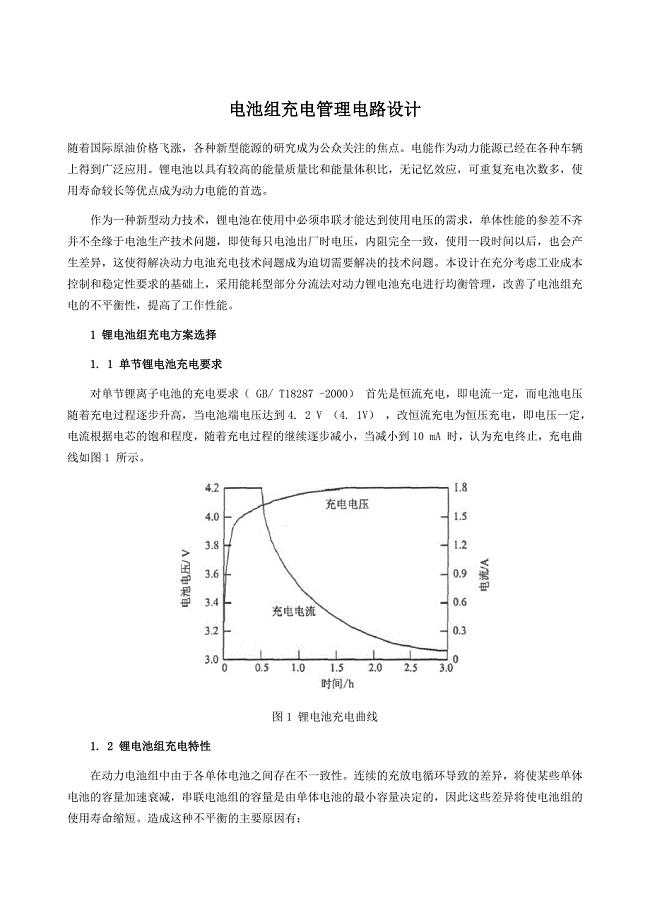
电池组充电管理电路设计
聚苯乙烯泡沫隔板项目可行性研究报告模板备案审批定制代写
高考化学一轮复习 专题1.3 化学计算中常用的几种方法押题专练
教育心理学精选试题(10套)学习参考
化学纤维油剂项目申请报告写作参考模板
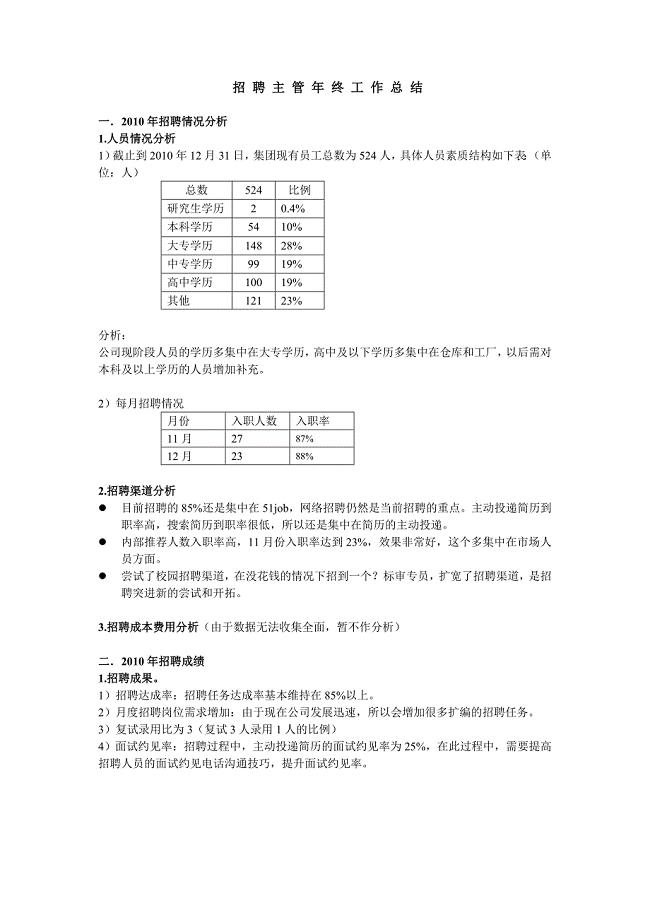
招聘主管年终工作总结

2023年服装公司年终工作总结书(4篇).doc
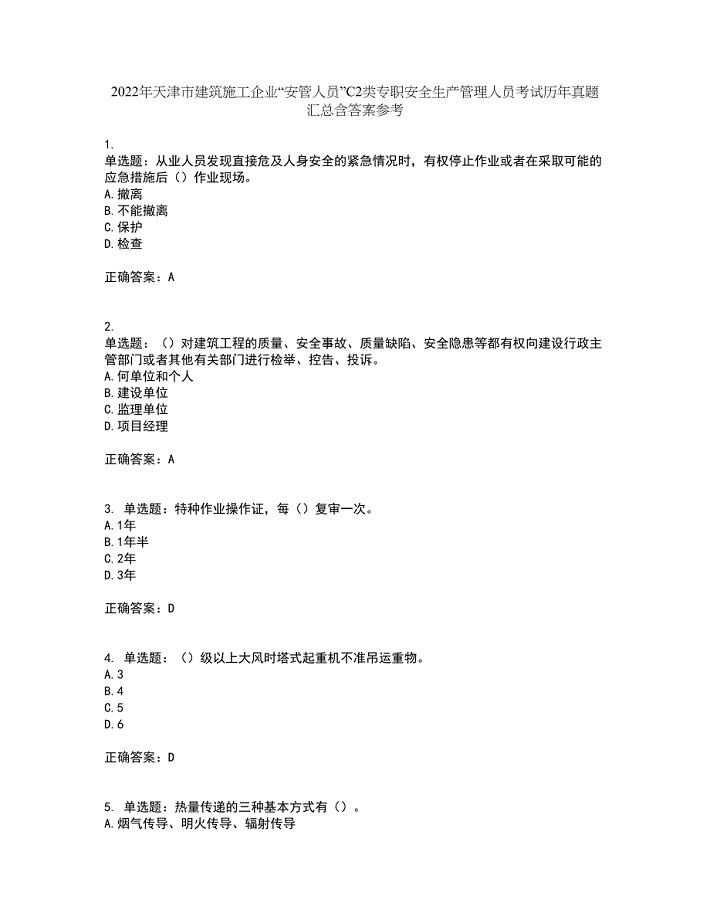
2022年天津市建筑施工企业“安管人员”C2类专职安全生产管理人员考试历年真题汇总含答案参考19
23、祖先的摇篮
培训工作总结心得汇总范文
管理入股的合作协议书范本
2019-2020学年高中物理 课时分层作业13 量子概念的诞生 光电效应与光的量子说(含解析)教科版选修3-5
 教育心理学考试试卷
教育心理学考试试卷
2024-02-05 8页
公路修建承包合同
2024-03-11 12页
电力安规线路部分
2023-03-23 7页
环己基异氰酸酯安全技术说明书
2023-09-15 19页
如何迎接临床基因扩增检验实验室技术验收
2023-05-01 9页
上市公司年度财务报表分析
2023-02-09 28页
DELL商用机五一促销方案
2023-01-17 12页
2020年法院科长的工作鉴定写
2023-04-11 8页
西财金融工程就业前景
2023-09-06 3页
人生否认目标
2023-12-29 5页