
RRP平面连杆机构的动态仿真设计开题报告
5页
1、毕业设计(论文)开题报告题目 RRP平面连杆机构的动态仿真专 业 名 称 机械设计制造及其自动化班 级 学 号 学 生 姓 名 指 导 教 师 填 表 日 期 一、 选题的依据及意义: 连杆机构的最基本形式是平面四杆机构,它是其它连杆机构的基础。所以,对平面四杆机构进行研究可以概括连杆机构内在的基本原理,从而用以连杆机构的设计。 机构运动学综合是按照给定的运动特性对机构进行系统的设计的过程,包括型综合和尺度综合两大主要内容,主要综合方法有解析法、作图法和实验法。作图法和实验法工作量大,设计精度低,仅适用于对机构精度要求不高的场合。近几十年来,随着工业技术的高速发展,人们对机构的复杂程度和精度要求越来越高,作图法和实验法已不能满足要求,而基于计算机辅助设计(CAD)的解析法得到了广泛的应用。 本课题的主要内容是平面四杆机构的连杆曲线及轨迹综合,其意义在于:一、深入研究计算机在设计和仿真连杆机构连杆曲线方面的应用,从而指导实践;二、总结出四杆机构轨迹综合的理论基础,从而指导多杆或复杂的低副平面机构的综合。此课题的主要目标是系统地对平面四杆机构连杆曲线进行研究,从而来获得连杆机构基本的原理和
2、综合方法,以便在实际中得到应用;主要特色是在各个设计进度中将会大量应用计算机高级语言编程来辅助设计和仿真平面四杆机构。二、 国内外研究概况及发展趋势(含文献综述):国内外研究概况在各种机构型式中,连杆机构的特点表现为具有多种多样的结构和多种多样的特性。仅就平面连杆机构而言,即使其连杆件数被限制在很少的情况下,大量的各种可能的结构型式在今天仍难以估计。它们的特性在每一方面是多种多样的,以致只能将其视为最一般形式的机械系统。在古代和中世纪许多实际应用方面的发明中就有连杆机构,例如我国东汉时期张衡发明的地震仪、列奥纳多达芬奇所描述的椭圆车削装置等,在这些发明中,都巧妙地应用了平面连杆机构。在近代,随着工业越来越高度自动化,在大量的自动化生产线上,许许多多的连杆机构得到了应用。特别是机器人学成为目前一个前沿学科,连杆机构又有了新的应用,例如日本等国家开发的类人型机器人等。在仿生学上,连杆机构巧妙地实现了人类关节的功能,例如国外研制的六杆假肢膝关节机构。当今,工业生产自动化程度越来越高,连杆机构以及它与其它类型的机构组成的组合机构将得到更加广泛的应用,特别是形状丰富多样的连杆曲线将应用在更多的场
《RRP平面连杆机构的动态仿真设计开题报告》由会员工****分享,可在线阅读,更多相关《RRP平面连杆机构的动态仿真设计开题报告》请在金锄头文库上搜索。
上海牛津英语5B语法知识点复习
2023年河南省三门峡市卢氏县横涧乡淤泥河村社区工作人员考试模拟题及答案
房屋装修的合同范本
有关责任感恩演讲稿4篇
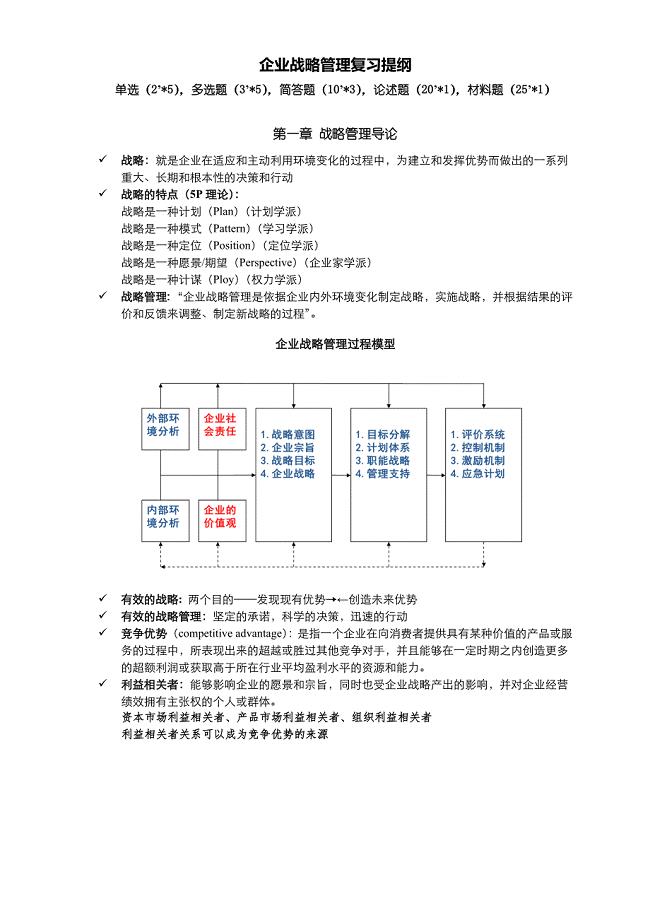
蓝海林-企业战略管理-期末复习提纲
河道生态治理工程重难点
行政部部门职能说明书
几何量公差与检测
多肉描写的作文范文【描写母亲的小学作文500字范文5篇】
财务会计年终个人工作总结
【精品模板】2022家乡写景作文合集8篇
社会科学院监控系统设计方案与报价书
爱岗敬业的心得体会精彩范文
施工项目安全生产管理制度学习资料
东北大学21春《计算机网络》离线作业1辅导答案62

2023低碳环保从我做起倡议书
青年节篮球赛策划方案
我的职业清单(职业规划)
2023年黑龙江佳木斯市富锦市兴隆岗镇东升村社区工作人员考试模拟试题及答案
广州休闲食品项目可行性研究报告(DOC 58页)
 JH125摩托车右曲轴零件制造工艺及工装铣床夹具设计论文说明书
JH125摩托车右曲轴零件制造工艺及工装铣床夹具设计论文说明书
2023-07-31 37页
柴油机齿轮室盖钻镗专机总体及主轴箱设计论文说明书
2023-12-26 36页
机械专业毕业实习报告
2022-09-06 3页
PLC控制的节能洗衣机系统设计文献综述
2023-05-17 5页
CG2-150型仿型切割机设计说明书
2024-01-04 17页
SF打散分级机总体及机架设计任务书
2022-09-11 5页
PLC控制的节能洗衣机系统设计任务书
2023-09-25 3页
Φ3X11M水泥磨总体设计及传动部件设计任务书
2022-12-14 5页
PLC控制的节能洗衣机系统设计论文
2022-08-08 41页
BSG2213宽带砂光机设计毕业论文
2022-09-29 40页