
FX1S控制步进电机的实例(图与程序)
3页
FX1S控制步进电机的实例(图与程序)此主题相关图片如下,点击图片看大图:采用绝对位置控制指令(DRVA),大致阐述FX1S控制步进电机的方法。由于水平有限,本实例采用非专业述语论述,请勿引用。FX系列PLC单元能同时输出两组100KHZ脉冲,是低成本控制伺服与步进电机的较好选择!PLS+,PLS-为步进驱动器的脉冲信号端子,DIR+,DIR-为步进驱动器的方向信号端子。所谓绝对位置控制(DRVA),就是指定要走到距离原点的位置,原点位置数据存放于32位寄存器D8140里。当机械位于我们设定的原点位置时用程序把D8140的值清零,也就确定了原点的位置。实例动作方式:X0闭合动作到A点停止,X1闭合动作到B点停止,接线图与动作位置示例如左图(距离用脉冲数表示)。程序如下图:(此程序只为说明用,实用需改善。)说明:在原点时将D8140的值清零(本程序中没有做此功能)32位寄存器D8140是存放Y0的输出脉冲数,正转时增加,反转时减少。当正转动作到A点时,D8140的值是3000。此时闭合X1,机械反转动作到B点,也就是-3000的位置。D8140的值就是-3000。当机械从A点向B点动作过程中,X1断开(如在C点断开)则D8140的值就是200,此时再闭合X0,机械正转动作到A点停止。当机械停在A点时,再闭合X0,因为机械已经在距离原点3000的位置上,故而机械没有动作! 把程序中的绝对位置指令(DRVA)换成相对位置指令(DRVI):当机械在B点时(假设此时D8140的值是-3000)闭合X0,则机械正转3000个脉冲停止,也就是停在了原点。D8140的值为0当机械在B点时(假设此时D8140的值是-3000)闭合X1,则机械反转3000个脉冲停止,也就是停在了左边距离B点3000的位置(图中未画出),D8140的值为-6000。一般两相步进电机驱动器端子示意图:FREE+,FREE-:脱机信号,步进电机的没有脉冲信号输入时具有自锁功能,也就是锁住转子不动。而当有脱机信号时解除自锁功能,转子处于自由状态并且不响应步进脉冲。V+,GND:为驱动器直流电源端子,也有交流供电类型。A+,A-,B+,B-分别接步进电机的两相线圈。此主题相关图片如下,点击图片看大图:此主题相关图片如下,点击图片看大图:
《FX1S控制步进电机的实例(图与程序)》由会员大米分享,可在线阅读,更多相关《FX1S控制步进电机的实例(图与程序)》请在金锄头文库上搜索。
2023年经理年度工作计划范文(5篇).doc
家具销售下半年工作计划范本(五篇).doc
实用的主任述职报告7篇
学习“铁人精神”心得体会模板(2篇)
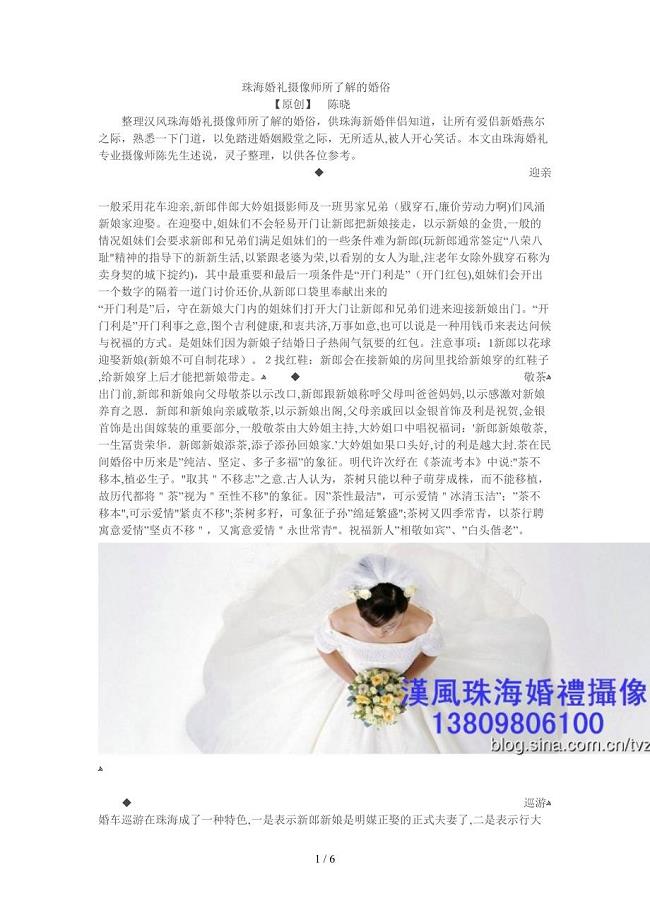
珠海婚礼摄像师所了解的婚俗
2023年财务个人年终工作总结范文(2篇).doc
防控疫情安全责任书
2016年全国代理营业机构负责人任职资格模拟考试(5)
项目部安全管理制度(三篇).doc
佛山汽车智能传感器项目投资计划书【模板范本】
新标准 新教材 新思路 新教法
不同社区群体的不同需求调研报告
光交箱规范指导手册范本
采购管理-冷冻生鲜物品供应链研究
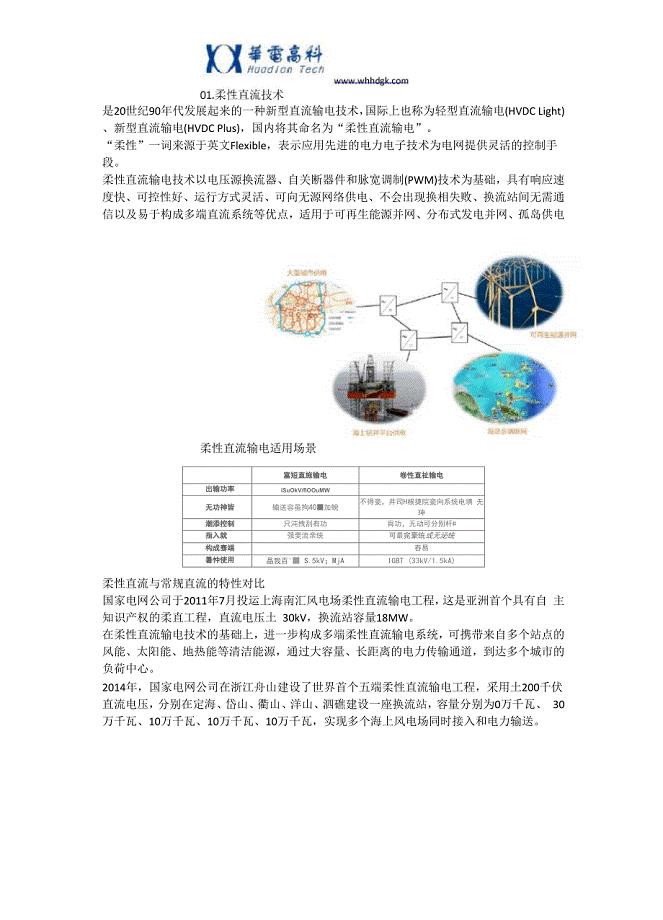
你应该了解的电力系统新技术
重庆荣瞪科贸有限公司薪酬管理制度
体育部新学期工作计划模板(五篇).doc
白云区房屋租赁协议格式版(九篇)
网游广告植入合同范本整理版范文
安全生产应急全新预案备案具体申请表
 声光控节电开关电路图与调试方法
声光控节电开关电路图与调试方法
2023-04-23 3页
太阳能电池生产管理
2023-08-13 3页
标识系统英译北京市地方标准3(商业服务)
2023-10-10 11页
电脑开关机图片更换
2023-09-07 5页
网络监控中交换机的选择
2024-01-09 2页
电梯控制系统的模拟实验
2023-12-01 67页
三相IGBT全桥隔离驱动电源设计
2023-09-11 4页
频敏变阻器启动控制原理
2022-09-10 3页
rpm命令参数使用详解
2023-03-28 12页
c语言字符串函数使用
2022-09-28 8页