
自动洗车机移动机械操作臂
29页
1、1 绪论随着经济的快速发展,家用轿车已经越来越多地为家庭所拥有,据统计,20XX底,我国私人汽车拥有量已超过1500万辆,与此同时,与汽车相关的需求也在激增,比如洗车设备。轿车每次用都会在表面积一层灰尘,不仅影响美观,还会对车漆造成伤害,因此对轿车表面的清洁工作很重要。通常,较少进行日常简单清洁的轿车每周要洗一到两次,每次洗车的费用在15元左右不含上光打蜡。轿车日常的简单清洁大多由车主人工完成,费时费力,因此有必要设计一种能够代替人进行轿车的日常清洁工作的服务型机器人操作臂。现在通常使用的洗车设备和方法主要包括以下几种:1高压水枪洗车:高压水枪洗车是先用高压水枪喷洒水雾润湿车身,再用高压射流清洗车身然后用清洗液清洗,最后用高压射流清洗干净,用麂皮将水吸干。高压水枪清洗速度快、效果好;但高压水枪压力大,容易对车漆造成损害:高压水柱的喷淋会改变空调冷凝器散热的方向,导致空调制冷失灵;会直接导致车灯胶条密封不良,影响车灯的正常工作,产生危险;会使密封不是很严的汽车侧门玻璃进水,锈蚀金属件,造成电线短路;劣质洗涤灵会降低车漆的亮度;洗后用毛巾多次擦拭会使车身增加划痕。2蒸汽洗车:蒸汽洗车是将水
2、加热成蒸汽后,用蒸汽来消洗汽车。其具有节水、节能的特点。但由于设备质量问题,存在安全性不高,极易产生污水造成污染,洗车效果和效率差的缺点。3无水洗车:无水洗车是先用掸子掸去车身表面浮土,再用无水洗车液进行汽车清洗的一种新型环保洗车方式。它具有节约水资源,绿色环保等优点,受到政府的扶持,但是,对于较脏车辆以及汽车底盘等部位,无水洗车不能满足要求,因此它并不能完全替代有水洗车。4无刷毛自动洗车机:采用高速水刀喷出的高压力水雾从上往下清洗汽车,灰尘冲掉后,自动泡沫喷头喷淋,然后用高压清水进行清洗。它有清洗速度快,效果好,不损伤车漆的优点,但存在水耗大,设备投资和运行费用高昂的缺点。5全自动电脑洗车机:电脑洗车机是利用电脑控制毛刷和高压水枪来清洗汽车的一种设备。由复杂的电路、气路、水路和机械部分构成。某自动洗车机结构如下,包括高压喷头、机械清洗机构、吹干机构,其中,清洗机构包括一个顶刷,两个大侧刷,两个小侧刷,如图1-1所示。1.轨道;2.机架;3、4.大侧刷;5.顶刷;6.小侧刷;7.吹干系统图1-1 大型电脑洗车结构简图洗车时,首先汽车停靠到位,由高压喷头喷水冲掉汽车表面泥沙,再由组成清洗
3、机构的五个刷子围绕汽车运动进行清洗、打蜡,然后由吹干机构将汽车表面吹干。这样的大型机构洗车时确实有很好的效果,但是用于个人洗车设备却很不适宜。首先在水、电等资源方面会有很大的消耗,另外,其体积通常3m*3m*3m,轨道10米,隧道式更大,价格几万到十几万间也让个人很难接受。以上几种一般用于洗车行,在个人洗车方面,除了传统的水桶加抹布外,现在所研究的个人洗车设备也多为手动。其中,前者耗费大量体力、时间,而且效率低,也不容易洗得干净,还容易刮损伤车漆。后者采用某些化学洗剂,在效果方面有很大改善,但是也要花费车主的大量时间和体力。适合个人使用的小型自动洗车设备的研究方面较少,具有代表性的为日本人平松正彦的一项专利,其结构主视图和俯视图如图1-2和图1-3所示。图1-2 平松正彦专利主视图图1-3 平松正彦专利俯视图该洗车装置主要包括洗车刷1、底盘3、支撑架6及底盘上的设备水箱、发电机、控制器等4。首先,洗车刷可以拆卸,安装在刷轴上,由电机7带动其转动,实现洗车动作。底盘上安装有两个驱动轮及相应的两个驱动电机和四个万向轮。支撑架上安装喷水管2、导轮5和照明装置、力传感器。控制部分、水箱、泵、发
4、电机等安装在底盘上洗车刷后面。 进行汽车清洗时,喷水管向车身喷水、洗车刷与车表面接触并转动洗去车表面灰尘等,同时,力传感器检测洗车刷和汽车间的压力,由力传感器检测出的压力值来控制转向单元,当该检测值大于预先设定的允许围时,使洗车机向远离车身外周面的离开方向行驶,而当该检测值小于预先设定的允许围时,使洗车机向接近该车身外周面的接近方向行驶。洗车设备围绕汽车行驶一周后完成车侧表面的清洗。但该设备的局限性在于它只有清洗侧面的立刷,不能对车顶部进行清洗,并不能完全代替人对汽车进行较全面的清洗。因此有必要设计一种可以代替人进行日常汽车清洗工作的机械操作臂。2 操作臂机构及驱动方式2.1 动作方案2.1.1 机器人操作臂介绍及常用形式机器人操作臂的设计涉及了力学、控制、计算机科学和电子工程等多个学科,其结构一般是由一系列连杆由旋转关节或移动关节相连接的具有一定自由度数的开式运动链,一端固定在支座上,另一端自由,安装手爪、工具等以实现各种操作。操作臂的自由度数按照不同的适用场合不同,一般工业机器人操作臂的自由度数在6个以下,高自由度数的机器人具有冗余度,一般用于假肢或特殊场合,其价格也相应更高。按照
《自动洗车机移动机械操作臂》由会员新**分享,可在线阅读,更多相关《自动洗车机移动机械操作臂》请在金锄头文库上搜索。

20192020学年高中数学第1章解三角形112余弦定理练习新人教A版必修5
大同锁具项目商业计划书【范文】
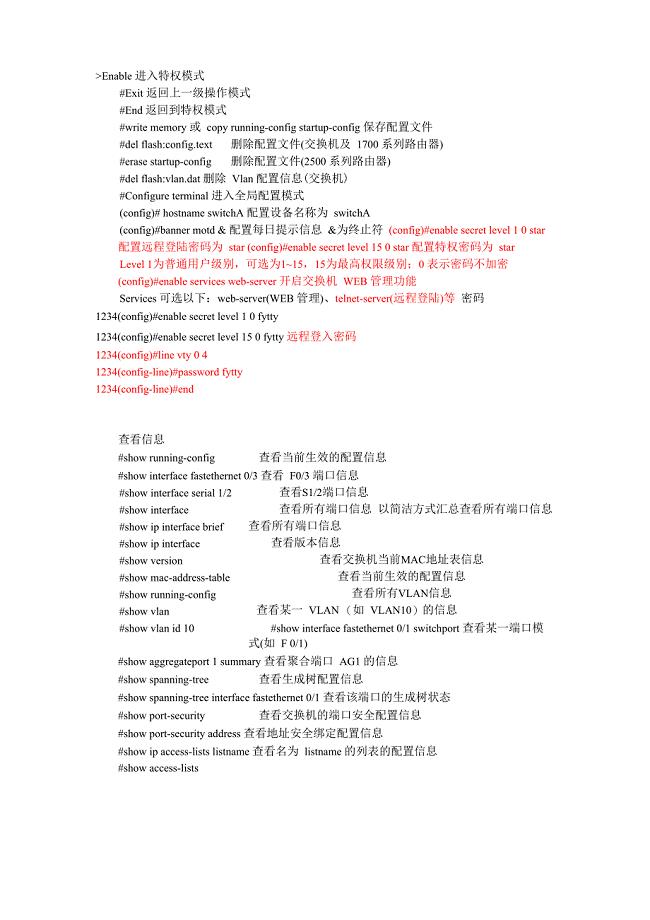
锐捷交换机配置文档

重大危险源清单
淘宝美工实习总结范文(2篇).doc
在金榜题名宴会上的讲话
北海针织圆形纬编机 项目建议书范文参考
2022年春季幼儿园家长工作总结
习作3秋天的树叶教学设计2
小学教师秋季学期工作计划(2篇).doc
南昌发电厂科学治理锅炉四管
脑片膜片钳实验方法
宁波白酒项目建议书
小学毕业家长鉴定评语.doc
接待办工作总结精选
2023年宇宙与人观后感10003篇(全文完整)
2023年最新检验员优秀的工作总结
企业竞争模拟小组报告
504A电气动力施工方案
检验科招聘试题汇总
 2022年流动式起重机司机资格证书考试内容及模拟题带答案点睛卷39
2022年流动式起重机司机资格证书考试内容及模拟题带答案点睛卷39
2022-10-19 11页
公园景观与水系改造工程施工设计方案
2022-10-02 116页
高二人教版英语必修五练习:Unit 4 Making the news section 1 Word版含答案精修版
2023-02-16 8页
新闻采访试题集锦
2024-02-16 19页
驻村帮扶责任人个人工作总结
2023-01-04 8页
上海市鲁迅中学高一上学期期中考试数学试题最新
2022-08-05 8页
联想服务体系流程及规范
2023-06-07 46页
上海市3季度涂料油墨颜料及类似产品制造中型企业运行分析
2023-10-31 14页
最新 【北师大版】八年级上册第三章3 轴对称与坐标变化
2023-03-26 2页
企业集团财务管理电大企业集团财务管理期末考试题整理版
2023-08-31 22页