
机构介绍外文翻译
6页
1、 Introduction to mechanismThe function of mechanism is to transmit or transform motion from one rigid body to another as part of the action of a machine. There are three types of common mechanical devices that can be used as basic elements of a mechanism.(1) Gear system, in which toothed members in contact transmit motion between rotating shafts.(2) Cam system, where a uniform motion of an input member is converted into a nonuniform motion of the output member.(3) Plane and spatial linkages are
2、also useful in creating mechanical motions for a point or rigid body.A kinematic chain is a system of links, which are either jointed together or are in contact with one another in a manner that permits them to move relative to one another. If one of the links is fixed and the movement of any other link to a new position will cause each of the other links to move to definite predictable position, the system is a constrained kinematic chain. Otherwise, the system is an unconstrained kinematic cha
3、in.A mechanism or linkage is a constrained kinematic chain, and is a mechanical divice that has the purpose of transferring motion and force from a source to an output. A linkage consists of links (or bar),generally considered rigid,which are connected by joints, such as pin (or revolute) or prismatic joints, to form open or closed chains (or loops). Such kinematic chains,with at least one link fixed, become (i) mechanisms if at least two other links remain mobility, or (ii) stuctures if no mobi
4、lity remains. In other words, a mechanism permits relative motion between its “rigid links”; a structure does not. Since linkages make simple mechanisms and can be designed to perform complex tasks, such as nonlinear motion and force ransmission, they will receive much attention in mechanism study.Mechanisms are used in a great variety of machines and devices. The simplest closed-loop linkage is the four-bar linkage, which has three moving links (plus one fixed link) and four pin joints. The lin
《机构介绍外文翻译》由会员cn****1分享,可在线阅读,更多相关《机构介绍外文翻译》请在金锄头文库上搜索。
2023年《活着》读后感7篇关于活着读后感
电子商务对税收的影响
电大09国民经济核算Word版
好用的工程承包合同模板7篇
济南市儿童福利院修缮工程谈判文件定稿(1)
商铺租赁意向协议经典版(6篇).doc
化工生产技术__丙烯腈ddwg
2022-2023学年海南省海口市秀英区市级名校中考物理最后一模试卷含解析
建筑顶岗实习报告:建筑毕业实习报告
劳务技术合同
幼师毕业实习个人总结
句型变化专项训练
国庆节个人总结
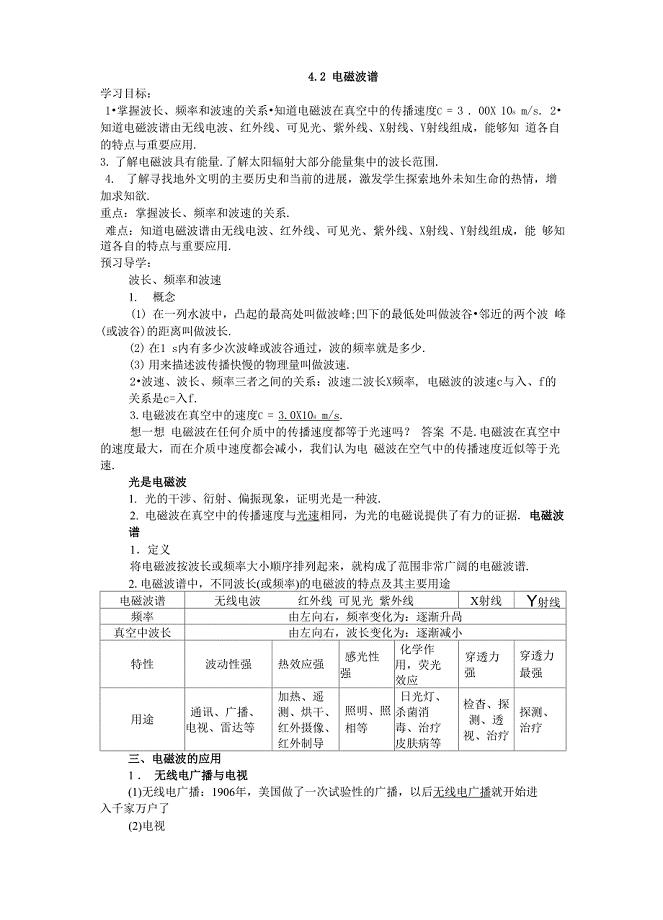
电磁波谱学案
关羽形象分析11
隧道无碴轨道施工作业指导书
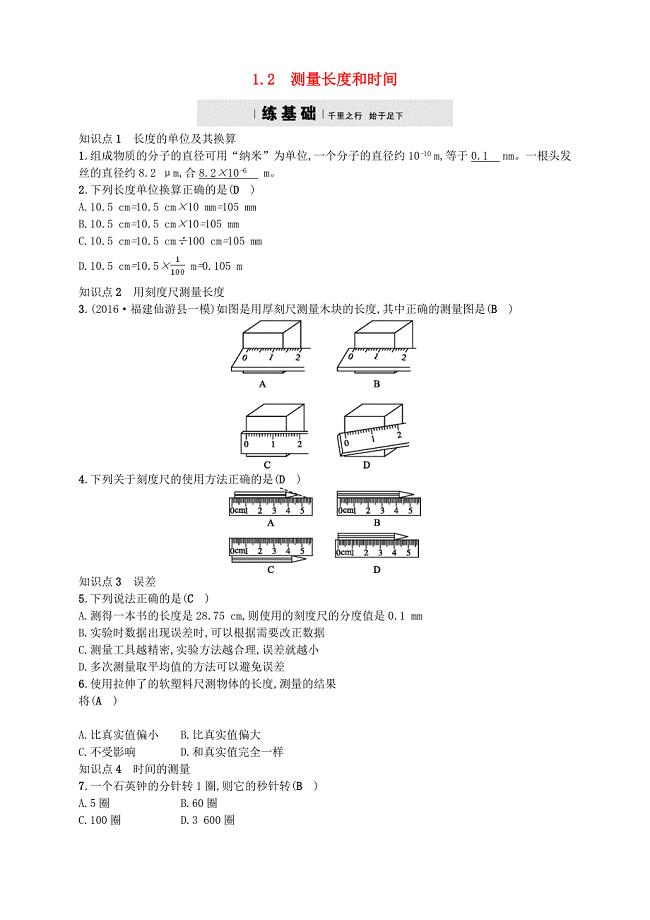
2017-2018学年八年级物理上册1.2测量长度和时间分层练习新版粤教沪版
医院医疗废物处理制度(二篇).doc
![[高中关于宽容的优秀作文五篇] 宽容500字优秀作文](https://union.152files.goldhoe.com/2023-12/16/a92373d8-afa2-4dda-9ea8-f3cf11d07843/pic1.jpg)
[高中关于宽容的优秀作文五篇] 宽容500字优秀作文
医院科研奖励管理办法
 企业管理模式九大系统
企业管理模式九大系统
2023-09-29 27页
仲裁委托代理协议范本
2022-12-28 3页
交通运输专业考试题带答案
2023-06-07 8页
节段梁施工程序及施工要点
2023-04-30 2页
个人述职报告_44
2023-11-27 12页
森林防火知识问答
2023-10-04 6页
抽水蓄能电站技术概况简介
2022-10-03 9页
加强校园文化建设
2023-11-16 12页
压力容器正确安全操作的方法示范文本
2023-12-11 4页
三次产业(3000字)返修
2023-04-11 6页