
连杆机构在机械装备中地地应用
9页
1、word研究生课程考核试卷适用于课程论文、提交报告科 目:机电系统设计与分析 教 师: 江桂云 姓 名: 沈振宇 学 号:20160713146专 业: 机械工程领域 类 别:课程论文 上课时间:2016年9月至2016年11月 考 生 成 绩:卷面成绩平时成绩课程综合成绩阅卷教师 (签名)某某大学研究生院制连杆机构在机械装备中的应用摘要:连杆机构是机械设备中常见的一种机构,它往往由假如干根杆状机构组成,有时还会用凸轮和滑块来代替其中一局部连杆,因为其制造简便,易于获得较高的制造精度以与其灵活多样的组合方式而广泛应用于机械行业。关键词:连杆机构、工业生产、运动学原理1连杆机构的根本介绍连杆机构中最根本的单元被称为运动副1,由四个运动副可以构成最简单的连杆机构,即四杆机构。许多机械设备中的结构都可以看作是由假如干个四杆机构组成的,因此,了解四杆机构是了解连杆机构的第一步。四连杆机构一般由四根杆状构件组成,四根杆状机构一般分为曲柄、摇杆、连杆和机架。而根据选取不同的机构作为原动件和从动件时,四杆机构又可以分为双曲柄机构、曲柄摇杆机构和双摇杆机构如图1.1。这些四杆机构的共同特点是将由电机所
2、提供的扭矩,即平面圆周运动转化为平面曲线往复运动,倘假如用滑块来代替四杆机构中的摇杆,还能获得平面直线往复运动,这种机构被称之为曲柄滑块机构如图1.22连杆机构的应用在工程实际中,机械设备不会只是单纯四杆机构,它们往往由很多根杆状构件以与滑轮、滑块等其他非杆状构建组成,但其原理仍然是使原动机运动的运动方式发生改变,以获得人们所期望的运动方式。例如用滑块代替四杆机构中的连杆,可以获得不同于曲柄滑块机构的另一种机构,摆动导杆机构,与曲柄滑块机构不同的是,摆动导杆机构可以在有限的空间内获得更大的行程,牛头刨床正是基于这一原理而被设计出来的2。如图2.1为头牛刨床的工作示意图,电动机经过减速器带动导杆机构和凸轮机构完成刨刀的往复运动和间歇移动。刨床工作时,刨头6由曲柄2带动右行,刨刀进展切削,称为工作行程。在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力为常数;刨刀左行时,即为空回行程,此行程无工作阻力。在刨刀空回行程时,凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。牛头刨床的设计充分利用了连杆机构能够改变运动方
3、式的特性,将原动件的回转运动转变为从动件的直线往复运动,即使电动机提供的扭矩转化为刀具的切削力,从而实现对工件进展平面加工的目的。而如果将输入与输出的运动方式对调,使主动件是直线反复运动的,如此可以输出圆周运动,最简单的四冲程单缸汽油发动机正是运用了这一原理。进气行程 压缩行程 作功行程排气行程如图2.2,气缸内装有活塞,活塞通过连杆与曲轴相连接。活塞在气缸内做往复运动,通过连杆推动曲轴转动。为了吸入新鲜气体和排出废气,设有进气门和排气门。 活塞顶离曲轴中心最远处,即活塞最高位置,称为上止点。活塞顶部离曲轴中心最近处,即活塞最低位置,称为下止点。上、下止点间的距离称为活塞行程,曲轴与连杆下端的连接中心至曲轴中心的距离称为曲轴半径。活塞每走一个行程相应于曲轴转角180。对于气缸中心线通过曲轴中心线的发动机,活塞行程等于曲柄半径的两倍。活塞从上止点到下止点所扫过的容积称为发动机的工作容积或发动机排量。 单杠发动机的工作循环包括四个活塞行程,既进气行程、压缩行程、膨胀行程作功行程和排气行程。1) 进气行程化油器式汽油机将空气与燃料先在气缸外部的化油器中进展混合,然后再吸入气缸。进气行程中,进
《连杆机构在机械装备中地地应用》由会员桔****分享,可在线阅读,更多相关《连杆机构在机械装备中地地应用》请在金锄头文库上搜索。
心理教育课堂心得体会5篇
人教版小学语文六年级上册期中测评试题共2套2
2022年高二化学选修5专题4单元测验
有关房屋租赁合同集合9篇
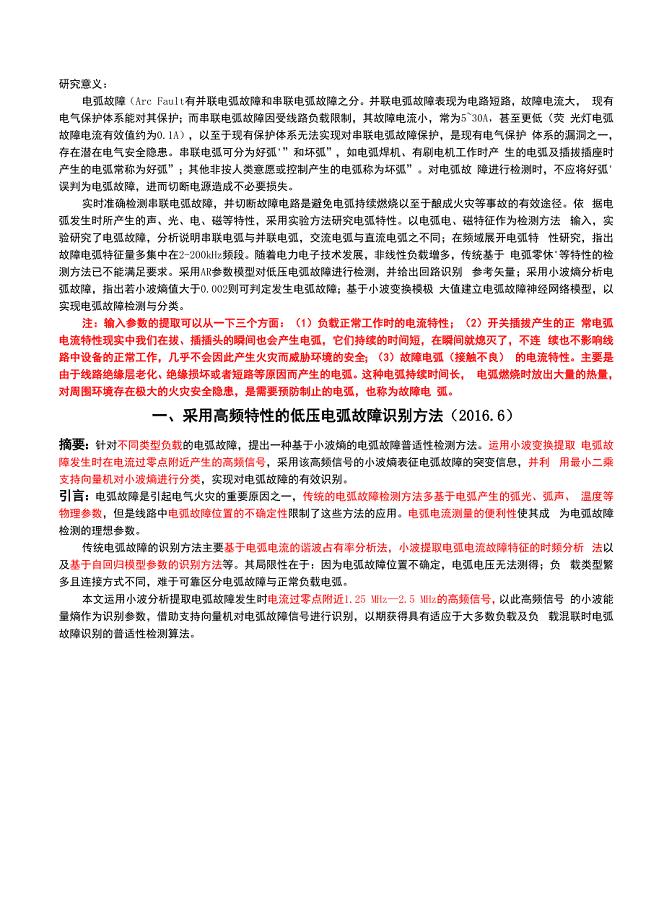
故障电弧诊断总结
2021-2022年四年级语文上册第七单元试卷
二年级下册应用题
10年11月人力资源管理师二级考试真题(包含理论和技能部分)

最新3到6岁儿童学习与发展指南Word编辑
2022年脱贫攻坚工作汇报材料范文2022脱贫攻坚汇报材料
2023物流行业工作计划(二篇).doc
参观作文600字 秋白如燕
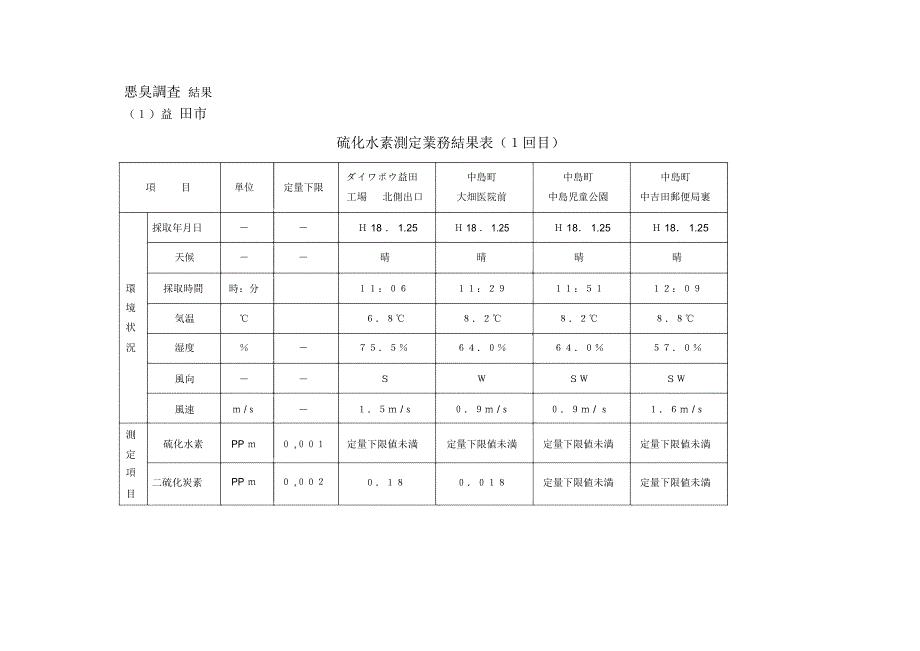
硫化水素测定业务结果表6回目
教学楼毕业设计--纯手算准确--详尽
抢救车管理制度
《有趣的跑》教学反思
10photoshop图层样式-斜面和浮雕
![五年级数学下册《体积和体积单位》说课稿[1]](https://union.152files.goldhoe.com/2022-11/12/d837832f-a3fd-4b1f-8d5e-81028636e401/pic1.jpg)
五年级数学下册《体积和体积单位》说课稿[1]
手机说明文500字初二作文.doc
化学药剂的安全管理办法
 道路专项顶管施工及方案
道路专项顶管施工及方案
2024-02-03 34页
西葫芦鸡爪子病的防治
2023-07-26 3页
数字电路课程设计霓虹灯控制电路设计报告
2023-10-14 33页
内分泌疾病内分泌疾病诊疗规范
2023-12-03 20页
新编高考数学一轮复习 题组层级快练54含解析
2022-11-16 7页
高二英语外研版选修六习题:课时卷十九 含答案精修版
2022-12-11 10页
高中地理 1.2太阳对地球的影响教案 湘教版必修1
2022-09-20 6页
原创文言文全解全析人教版九年级上册
2024-01-09 68页
引水河泵站及引水河整治一期工程外河出水口施工方案(修改)
2023-10-28 20页
朗文英语2b期末卷
2023-07-04 4页