
ABB机器人~编程基本指令之运动指令
12页
1、一 运动指令 MoveJMoveJConc,ToPoint,SpeedVT,ZoneZInpos,ToolWObj;1 Conc,:协作运动开关。(switch)2 ToPoint:目标点,默认为*。(robotarget)3 Speed:运行速度数据。(speeddata)4 V:特殊运行速度mm/s。(num)5 T:运行时间控制s。(num)6 Zone:运行转角数据。(zonedata)7 Z:特殊运行转角mm。(num)8 Inpos:运行停止点数据。(stoppointdata)9 Tool:工具中心点(TCP)。(tooldata)10 WObj:工件坐标系。(wobjdata)11 应用 机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。12 实例 MoveJ p1,v2000,fine,grip1; MoveJ Conc,p1,v2000,fine,grip1; MoveJ p1,v2000V:=2200,z40Z:=45,grip1; MoveJ p1,v2000,z40,grip1WObj:=wobjTa
2、ble;MoveJ p1,v2000,fineInpos:=inpos50,grip1;二 运动指令 MoveLMoveLConc,ToPoint,SpeedVT,ZoneZInpos,ToolWObjCorr;1 Conc,:协作运动开关。(switch)2 ToPoint:目标点,默认为*。(robotarget)3 Speed:运行速度数据。(speeddata)4 V:特殊运行速度mm/s。(num)5 T:运行时间控制s。(num)6 Zone:运行转角数据。(zonedata)7 Z:特殊运行转角mm。(num)8 Inpos:运行停止点数据。(stoppointdata)9 Tool:工具中心点(TCP)。(tooldata)10 WObj:工件坐标系。(wobjdata)11Corr:修正目标点开关。(switch)12 应用 机器人以线性移动过方式运动至目标点,当前点与目标点二点决定一条直线,机器人运动状态可控,运动路径保持唯一,可能出现死点,常用于机器人在工作状态移动。13 实例 MoveL p1,v2000,fine,grip1; MoveL Conc,p1,v2
3、000,fine,grip1; MoveL p1,v2000V:=2200,z40Z:=45,grip1; MoveL p1,v2000,z40,grip1WObj:=wobjTable;MoveL p1,v2000,fineInpos:=inpos50,grip1;MoveL p1,v2000,fine,grip1Corr;三 运动指令 MoveCMoveCConc,CirPoint,ToPoint,SpeedVT,ZoneZInpos,ToolWObjCorr;1 Conc,:协作运动开关。(switch)2CirPoint:中间点,默认为*。(robotarget)3 ToPoint:目标点,默认为*。(robotarget)4 Speed:运行速度数据。(speeddata)5 V:特殊运行速度mm/s。(num)6 T:运行时间控制s。(num)7 Zone:运行转角数据。(zonedata)8 Z:特殊运行转角mm。(num)9Inpos:运行停止点数据。(stoppointdata)10Tool:工具中心点(TCP)。(tooldata)11WObj:工件坐标系。(wob
4、jdata)12Corr:修正目标点开关。(switch)13 应用 机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点三点决定一段圆弧,机器人运动状态可控,运动路径保持唯一,常用于机器人在工作状态移动。14实例 MoveC p1,p2,v2000,fine,grip1; MoveC Conc,p1,p2,v200V:=500,z1z:=5,grip1; MoveC p1,p2,v2000,z40,grip1WObj:=wobjTable; MoveC p1,p2,v2000,fineInpos:=inpos50,grip1;MoveC p1,p2,v2000,fine,grip1Corr;15 限制 不可能通过一个MoveC指令完成一个圆。 MoveL p1,v500,fine,tool1; MoveC p2,p3,v500,z20,tool1; MoveC p4,p1,v500,fine,tool1;四 运动指令 MoveJDOMoveJDO ToPoint,SpeedT,Zone,ToolWObj,Signal,Value;1 ToPoint:目标点,默认为*。(
《ABB机器人~编程基本指令之运动指令》由会员cl****1分享,可在线阅读,更多相关《ABB机器人~编程基本指令之运动指令》请在金锄头文库上搜索。
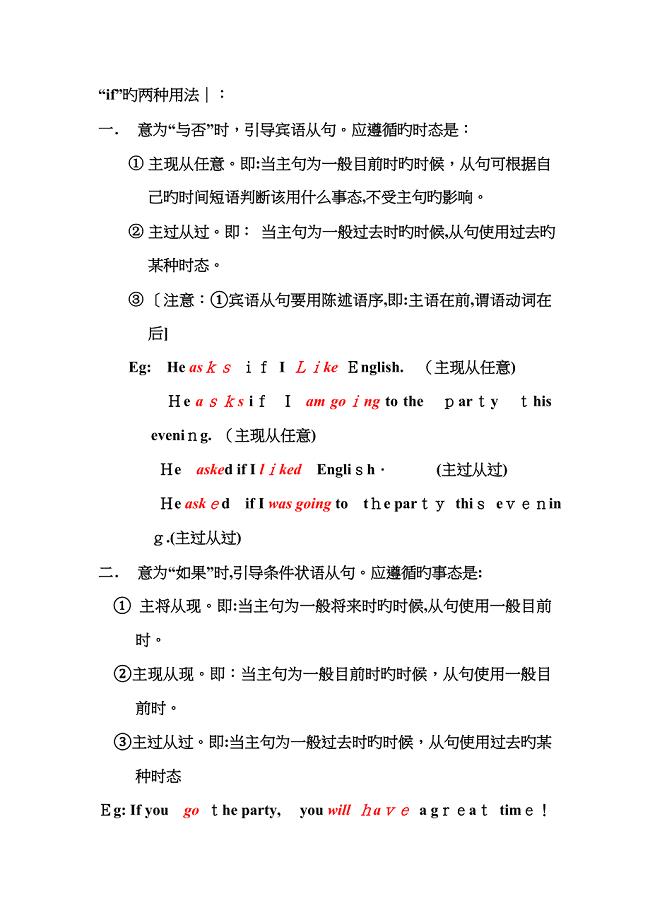
If 的两种用法
“校校通”网络方案
劳动合同法:司法考试合同法分则:行纪合同电子版
水电站进水口及引水隧洞施工
描写青春的日记最新5篇
二手房买卖补充协议(1)
小学生感恩活动总结
员工简单劳动合同协议5篇
2022年01月2022年广东茂名市茂南区保密技术检查中心等单位招考聘用模拟卷
暑假社会实践心得体会精
2023个人财务工作总结(2篇).doc
最新《水利水电施工组织设计》水库除险加固施工组织设计方案
学校健康教育督导工作计划(四篇)
吊篮作业施工方案
财政所人员的个人工作总结
《汤姆·索亚历险记》7.汤姆·索亚历险记(节选)(优质教案)
基于虚拟仪器的风扇故障检测系统毕业设计说明书
试用期转正个人工作总结参考模板(3篇).doc
社区简短的个人述职报告总结(4篇).doc
某企业咨询汇总8
 时间序列模型分析的各种stata命令
时间序列模型分析的各种stata命令
2023-01-09 38页
货代船公司简称代码
2022-10-27 7页
Linux必学的60个命令
2024-02-18 11页
网络电视的传播学解读
2023-04-29 5页
大学计算机导论复习提纲
2023-11-23 6页
粮食行业除尘系统设计
2023-09-26 8页
电脑操作技巧(美化版)
2023-06-07 19页
中海物业车库操作流程
2023-08-25 5页
Java编程思想学习笔记
2022-11-29 46页
excelhome扩展函数库
2023-11-04 4页