
机械专业综合课程设计说明书--车灯涂胶作业工业机器人离线编程与虚拟仿真
11页
1、机 械 专 业 综 合 课 程 设 计 说 明 书车灯涂胶作业工业机器人离线编程与虚拟仿真学 院(系): 机电工程学院 专 业: 机械设计制造及自动化 目 录1车灯涂胶作业工作站描述与构成12工具坐标系的标定方法13人机交互指令的应用33.1 写屏指令“TPWrite”33.2 示教器端人工输入数值指令“TPReadNum”33.3 屏幕上显示不同选项供用户选择指令“TPReadFK”33.4 清屏指令“TPErase”43.5 等待类指令及其应用43.5.1 WaitDI43.5.2 WaitUntil43.5.3 Waittime44计时指令的应用45 I/O配置56示教任务实施5参 考 文 献91车灯涂胶作业工作站描述与构成车灯涂胶作业工作站是利用IRB1410机器人将胶体均匀地涂抹在灯壳胶槽内;本工作站已经预设涂胶效果,需要在此工作站中以此完成I/O配置、程序数据创建、目标点示数、程序编写及调试,最终完成整个汽车车灯的涂胶过程。机器人工作台布局如图1-1所示。图1-1 机器人工作站布局涂胶是车灯装配过程中重要的一个环节,车灯涂胶轨迹较为复杂,对布胶均匀性、密封性、外观性都有较高
2、的要求;工业机器人可以灵活地生成复杂的空间轨迹,完成复杂的布胶动作,并且运动快速、平稳、重复精度高,可充分保证生产节拍需求,并保证胶条均匀,使产品质量稳定。12工具坐标系的标定方法在轨迹类应用过程中,机器人所使用的工具多数为不规则形状,这样的工具很难通过测量的方法计算出工具尖点相对于初始工具坐标系tool0的偏移,所以通常采用特殊的标定方法来定义新建的工具坐标系如图2-1所示。此工作站中对应的校准针、校准针座如图2-2所示。校准之前,为避免视线干扰,可将灯罩A、灯罩B、围栏、原工具坐标系框架tGlueGun取消可见;将校准针、校准针座设为可见。图2-1 工具坐标系设定图2-2 校准针、校准针座位置3人机交互指令的应用在机器人程序运行过程中,经常需要添加人机交互,实时显示当前信息或者人工选择确认等,下面列举几个常用的人机交互指令的用法。3.1 写屏指令“TPWrite”该指令的作用是将字符串显示在示教器屏幕上,在字符串后面可增加数据显示,如:TPWrite “The last cycle time is ” Num:=cycletime;若对应数值型数值数据cycletimede 的数值
3、为5,运行该指令,则示教器屏幕上会显示“The last cycle time is 5”。23.2 示教器端人工输入数值指令“TPReadNum”该指令的作用是通过键盘输入的方式对指定变量进行赋值,如:TPReadNum reg1,“ how many products should be produced ?” ;运行该指令,示教器屏幕上会出现数值输入键盘,假设人工输入 5,则对应的 reg1被赋值为 5。3.3 屏幕上显示不同选项供用户选择指令“TPReadFK”该指令最多支持5个选项,如:TPReadFK reg1,“More?”,stEmpty,“Yes”,“No”;运行该指令,则屏幕上的显示效果如表3.3-1所示,可人工进行选择。若选择为Yes,则对应reg1被赋值为选项的编号4;则后续可以根据reg1的不同数值执行不同的指令。More? Yes No表3.3-1 写屏效果3.4 清屏指令“TPErase”运行该指令,则屏幕上的指令显示全部清空。3.5 等待类指令及其应用3.5.1 WaitDI该指令的作用是等待数字输入信号达到指定状态,并可设置最大等待时间以及超时标识,如
《机械专业综合课程设计说明书--车灯涂胶作业工业机器人离线编程与虚拟仿真》由会员liy****000分享,可在线阅读,更多相关《机械专业综合课程设计说明书--车灯涂胶作业工业机器人离线编程与虚拟仿真》请在金锄头文库上搜索。
隧道互联互通供水管道工程设备、材料采购技术规格书
人饮连通改造(二期)工程-施工设计总说明
人居环境整治项目边坡工程施工图设计说明书
抗旱应急提水后期工程施工图设计总说明
新材料科技城化医大道道路改造工程--排水设计说明
长江流域场镇雨污分流改造项目--排水工程设计说明
中锋镇人行桥--桥梁施工图设计说明
水天坪组团城市燃气管道等老化更新改造项目施工图设计说明
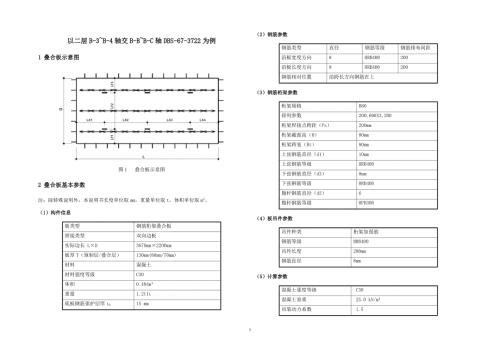
1#B区_叠合板计算书
工业园区道路改造工程--管网工程施工图设计说明
保障性租赁住房燃气管道设施改造工程施工设计总说明
2#人行桥施工图设计说明
污水厂四期扩建工程海绵施工图设计说明
铜西村安全饮水项目施工图设计总说明
1号道路拓宽工程--市政岩土结构施工图设计说明
污水管道安装工程施工图设计说明
1#A区_叠合板计算书
1#人行桥施工图设计说明
1号路道路拓宽改造工程 交通工程施工图设计说明
滨江路等6个社区老旧小区改造提升工程(一标段)建筑管网整改施工图设计说明
 5000 m3-d印染废水处理工艺设计
5000 m3-d印染废水处理工艺设计
2024-01-03 50页
矿井通风与安全课程设计--塔山矿1500万t-a新井通风设计
2024-01-03 57页
《虚拟仪器设计》实验指导书
2023-12-29 56页
住宅承接查验表格
2023-12-19 80页
(全)物业承接查验操作指南
2023-12-19 371页
机械设计基础课程设计任务书--机械厂装配车间输送带传动装置设计
2023-12-15 43页
一例猪圆环病毒病的诊断与治疗
2023-12-15 14页
网上资源操作系统实验报告
2023-12-15 30页
机械专业综合课程设计说明书--落料拉伸复合模
2023-12-15 28页
承接查验评分表
2023-12-15 16页