
机械专业综合课程设计说明书--产品搬运作业工业机器人
21页
1、机 械 专 业 综 合 课 程 设 计 说 明 书 产品搬运作业工业机器人学 院(系):机电工程学院专 业:机械设计制造及其制动化目 录1设计内容11.1 搬运作业工业机器人11.2 机器人I/O通信设置11,3搬运类工具坐标系、 有效载荷设置11.4常用运动指令使用11.5常用信号设置指令运用11.6偏移函数Offs运用12工作站描述12.1玻璃输送链12.2吸盘工具13知识储备23.1I/O板卡设置23.2 常用运动指令23.3常用I/O控制指令43.4常用逻辑控制指令43.5注释行“!53.6 Offs偏移功能63.7 CRobT功能63.8 常用写屏指令63.9 功能程序FUNG64任务实施84.1工作站解包84.2创建备份并执行I启动114.3配置I/O单元114.4配置I/O信号114.5配置系统输入/输出124.7 创建工件坐标系数据134. 8 创建载荷数据134.9程序注解141设计内容1.1 搬运作业工业机器人1.2 机器人I/O通信设置1,3搬运类工具坐标系、 有效载荷设置1.4常用运动指令使用1.5常用信号设置指令运用1.6偏移函数Offs运用2工作站描述工业机
2、器人在搬运领域中有着广泛的应用, 可以代替人力完成大量重复性工作, 小到电子零部件, 大到汽车车身, 均可使用机器人进行搬运处理, 降低劳动强度, 特别适合一些物料数量多或者重量大或者体积大的搬运场合。人本工作站以玻璃搬运为例,利用ABB公司的IRB6700机器人将玻璃从生产线土搬运至立式清洗机上, 以便完成后续的玻璃清洗工作, 如图2-1所示。图2.1玻璃搬运工作站布局2.1玻璃输送链此输送链对接玻璃生产线前端生产设备,将玻璃传送至输送链末端,并且在末端设置有传感器,检测玻璃是否到位, 到位后将信号传送至机器人系统,则机器人进行下一步玻璃拾取处理, 如图2-2所示。 图2.2玻璃搬运工作站布局2.2吸盘工具机器人末端法兰盘装有吸盘工具, 利用真空发生器产生真空, 对玻璃进行拾取处理。机器人利用输出信号控制真空的产生与关闭, 从而实现玻璃的拾取与释放, 如图2-3所示。 图2.3吸盘工具3知识储备3.1I/O板卡设置ABB标准1/0板卡下挂在Device Net总线上面, 常用型号有DSQC651 ( 8个数字输入, 8个数字输出, 2个模拟输出) , DSQC652 ( 16个数字输
《机械专业综合课程设计说明书--产品搬运作业工业机器人》由会员liy****000分享,可在线阅读,更多相关《机械专业综合课程设计说明书--产品搬运作业工业机器人》请在金锄头文库上搜索。
隧道互联互通供水管道工程设备、材料采购技术规格书
人饮连通改造(二期)工程-施工设计总说明
人居环境整治项目边坡工程施工图设计说明书
抗旱应急提水后期工程施工图设计总说明
新材料科技城化医大道道路改造工程--排水设计说明
长江流域场镇雨污分流改造项目--排水工程设计说明
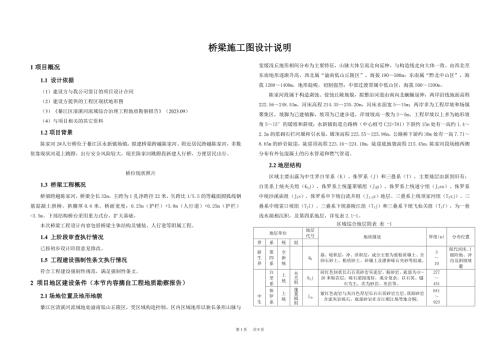
中锋镇人行桥--桥梁施工图设计说明
水天坪组团城市燃气管道等老化更新改造项目施工图设计说明
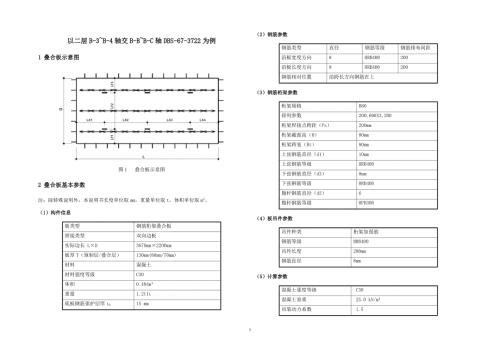
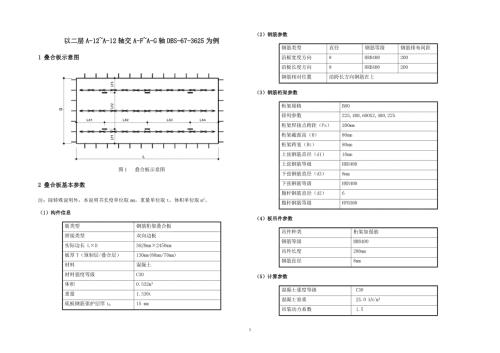
1#B区_叠合板计算书
工业园区道路改造工程--管网工程施工图设计说明
保障性租赁住房燃气管道设施改造工程施工设计总说明
2#人行桥施工图设计说明
污水厂四期扩建工程海绵施工图设计说明
铜西村安全饮水项目施工图设计总说明
1号道路拓宽工程--市政岩土结构施工图设计说明
污水管道安装工程施工图设计说明
1#A区_叠合板计算书
1#人行桥施工图设计说明
1号路道路拓宽改造工程 交通工程施工图设计说明
滨江路等6个社区老旧小区改造提升工程(一标段)建筑管网整改施工图设计说明
 5000 m3-d印染废水处理工艺设计
5000 m3-d印染废水处理工艺设计
2024-01-03 50页
矿井通风与安全课程设计--塔山矿1500万t-a新井通风设计
2024-01-03 57页
《虚拟仪器设计》实验指导书
2023-12-29 56页
住宅承接查验表格
2023-12-19 80页
(全)物业承接查验操作指南
2023-12-19 371页
机械设计基础课程设计任务书--机械厂装配车间输送带传动装置设计
2023-12-15 43页
一例猪圆环病毒病的诊断与治疗
2023-12-15 14页
网上资源操作系统实验报告
2023-12-15 30页
机械专业综合课程设计说明书--落料拉伸复合模
2023-12-15 28页
承接查验评分表
2023-12-15 16页