
杭州电子科技大学XY数控工作台机电系统设计说明书
25页
1、一、总体设计方案1.导轨副的选用导轨副的种类:1) 滚柱交叉导轨副是由两根具有V型滚道的导轨、滚子保持架、圆柱滚子等组成,相互交叉排列的圆柱滚子在经过精密磨削的V型滚道面上作往复运动,可承受各个方向的载荷,实现高精度、平稳的直线运动。特点:1.滚柱导轨块是一种精密的直线滚动导轨,具有较高的承载能力和较高的刚性,对反复动作、起动、停止往复运动频率较高情况下可减少整机重量和传动机构及动力费用。2.滚柱导轨块可获得较高的灵敏度和高性能的平面直线运动。在重载或变载的情况下,弹性变形较小且能获得平稳的直线运动,没有爬行。3.滚柱导轨块由于其滚动体-滚柱在滚动时导向好,能自动定心,故可提高机械的定位精度。4.滚柱导轨块中的滚柱在基体中循环运动,故采用滚动导轨块,不受机床床身长度的限制,可根据承载大小及选用规格确定导轨块数量。5.滚柱导轨块的应用面较广,小规格的可用在模具、仪器等的直线运动部件上,大规格的则可用于重型机床、精密仪器的平面直线运动,尤其适用于NC、CNC数控机床。6.滚动摩擦力阻力低,稳定性能好;7.起动摩擦力小,随动性能好;8.接触面积大,弹性变形量小,有效运动体多,易实现高刚性、高
2、负荷运动;结构设计灵活,安装使用方便。2) 直线滚动导轨副特点:具有摩擦因数小,不易爬行,便于安装和预紧,结构紧凑等优点,其缺点是抗振性较差,成本较高。直线滚动导轨副有导轨和滑块两部分组成,一般滑块中装有两组滚珠,当滚珠从工作轨道滚到滑块短部时,会经端面挡板和滑块中的返回导轨返回在导轨和滑块之间的滚道内循环滚动。3) 静压导轨副特点:将具有一定压力的油或气体介质通入导轨的运动件与导向支承件之间,运动件浮在压力油或气体薄膜之上,与导向支承件脱离接触至使摩擦阻力大大降低。运动件受外载荷作用后,介质压力会反馈升高,以支撑外载荷。要设计的X-Y工作台是用来配套轻型的立式数控铣床的,需要承受的载荷不大,但脉冲当量小,定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小,不易爬行,传动效率高,结构紧凑,安装预紧方便等优点。2.丝杠螺母副的选用丝杠螺母副的种类:滑动丝杠副:特点:1) 结构简单、制造容易。由于滑动丝杠副为一般的丝杠制造容易、螺母所组成,故其结构简单。2) 减速传动比大,由于当丝杠转过一周时,做得很小,因此,采用滑动丝杠副。3) 摩擦力大、螺母只移动一个导程,而导程可以杠副可以得
3、到很大的减速比。f-D动效率低滑动丝杠副的工作面为滑动摩擦,故其摩擦阻力大,传动效率低。4) 具有自锁性。当使其螺旋升角小于摩擦角时,具有自锁性。5) 运转平稳则可以使滑动丝杠副具有自由于丝杠与螺母的啮合是连续的,而且同时呛金多。所以其运转平稳、无噪声。但低速或微调时可能出现爬行。滚珠丝杠副:滚珠丝杠副是在丝杠和螺母的滚道之间放入适量的滚珠,使螺纹间产生滚动摩擦。其作用是将旋转运动转变为直线运动或将直线运动转变为旋转运动。丝杠或螺母转动时,带动滚球沿螺纹滚道滚动,螺母的螺旋槽两端设有滚球回程引导装置,滚球通过此装置自动返回其入口,形成循环回路。特点:传动效率高,运动平稳,使用寿命长等特征,广泛应用于各种工业设备,精密仪器和数控机床等。选用滚珠丝杠副的理由:伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,要满足0.04mm的脉冲当量和0.02mm的定位精度,滑动丝杠副无能为力,只有选用滚珠丝杠副才能达到。滚珠丝杠副的传动精度高,动态响应快,运转平稳,寿命长,效率高,预紧后可消除反向间隙。3.伺服电动机的选择1) 直流伺服电动机:直流无刷伺服电机特点:转动惯量小、启动电压低、空载电流
4、小; 弃接触式换向系统,大大提高电机转速,最高转速高达100 000rpm;无刷伺服电机在执行伺服控制时,无须编码器也可实现速度、位置、扭矩等的控制; 不存在电刷磨损情况,除转速高之外,还具有寿命长、噪音低、无电磁干扰等特点。直流有刷伺服电机特点: 体积小、动作快反应快、过载能力大、调速范围宽。低速力矩大, 波动小,运行平稳。低噪音,高效率。后端编码器反馈(选配)构成直流伺服等优点。2) 交流伺服电动机:异步型交流伺服电动机特点:异步型交流伺服电动机指的是交流感应电动机。它有三相和单相之分,也有鼠笼式和线绕式,通常多用鼠笼式三相感应电动机。其结构简单,与同容量的直流电动机相比,质量轻1/2,价格仅为直流电动机的1/3。缺点是不能经济地实现范围很广的平滑调速,必须从电网吸收滞后的励磁电流。因而令电网功率因数变坏。同步型交流伺服电动机:同步型交流伺服电动机虽较感应电动机复杂,但比直流电动机简单。它的定子与感应电动机一样,都在定子上装有对称三相绕组。而转子却不同,按不同的转子结构又分电磁式及非电磁式两大类。非电磁式又分为磁滞式、永磁式和反应式多种。其中磁滞式和反应式同步电动机存在效率低、功率
《杭州电子科技大学XY数控工作台机电系统设计说明书》由会员206****923分享,可在线阅读,更多相关《杭州电子科技大学XY数控工作台机电系统设计说明书》请在金锄头文库上搜索。

人教版小学英语单词分类记忆汇总表excel版
人教版九年级全一册英语词汇
2019年开展垃圾分类的工作总结报告【五篇】
六年级英语绘本教案
外研版小学英语单词表全带音标(一年级起点1-12册)
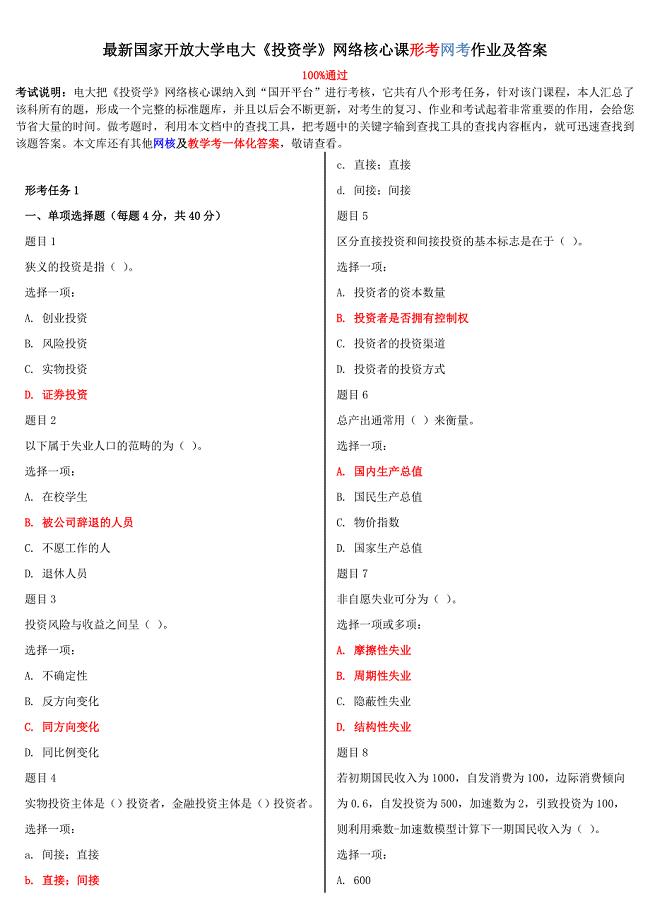
最新国家开放大学电大投资学网络核心课形考网考作业及答案

初中人教版七年级下册生物复习提纲

高中英语语法大全高中英语语法系统全解word版

☆初中英语语法专项练习习题以及答案
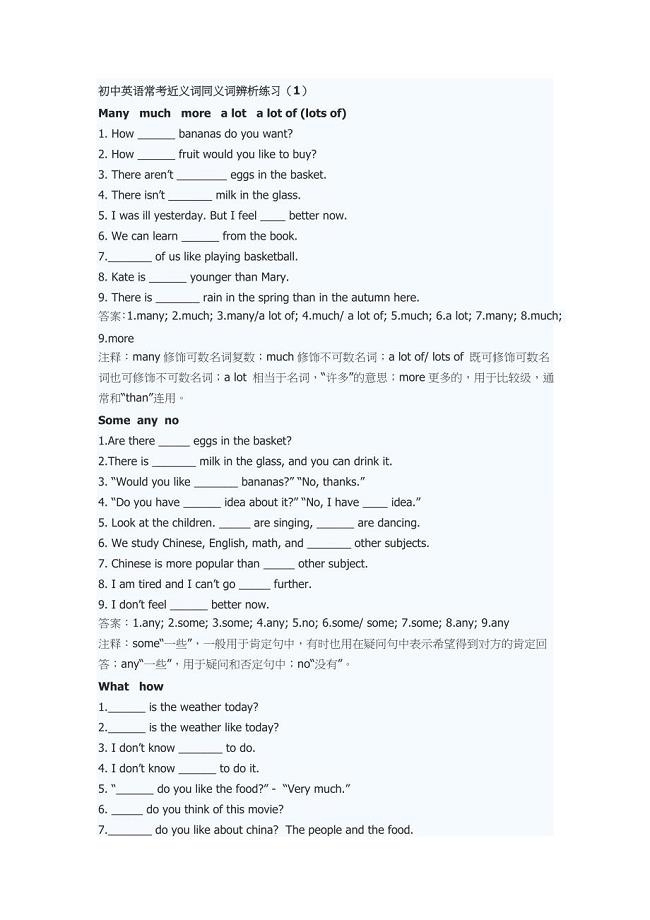
初中英语常考近义词同义词辨析

高中物理选修3-5全套教案(人教版) (1)

英语绘本《WeatherReport》教学设计
防护功能平战转换设计专篇各专业
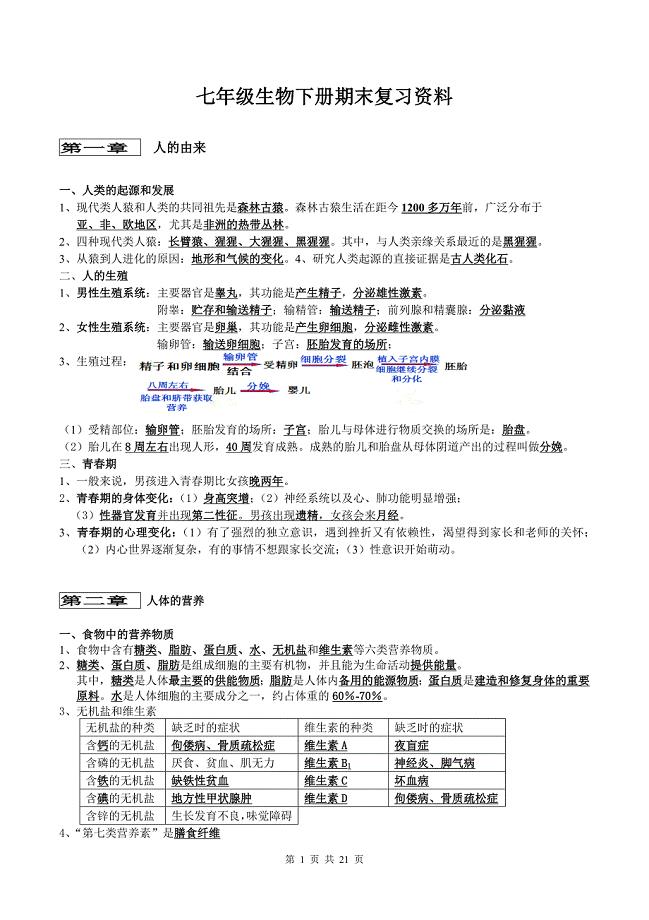
初中人教版七年级上册下册全册生物复习提纲21页 (1)
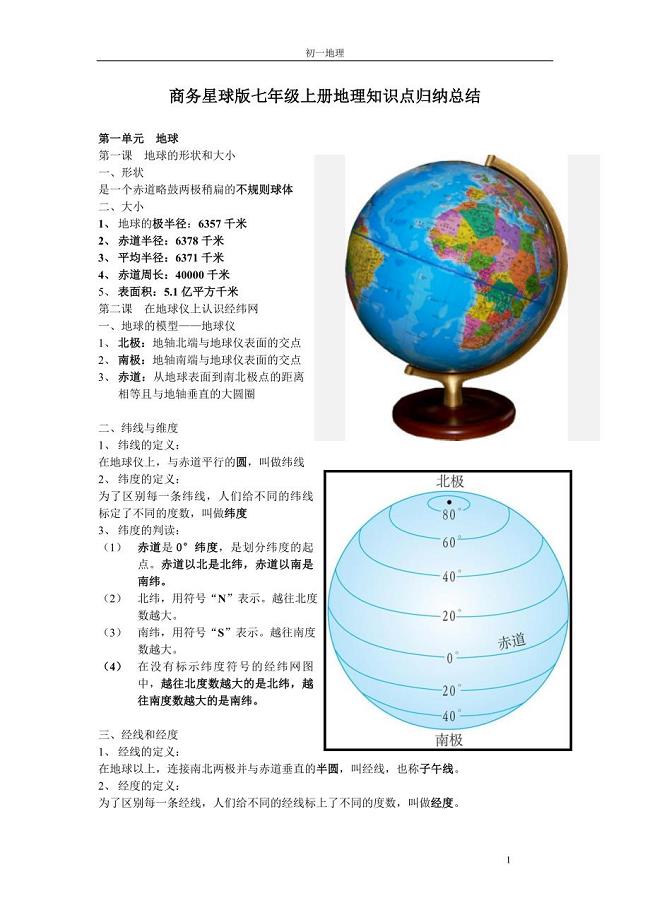
商务星球版七年级上册地理知识点归纳总结
初中人教版七年级上册下册全册生物复习提纲21页 (2)
高中高考语文作文词汇句型优美句子万能语句大全
中考地理选择题专项复习550题含答案
北师大版七年级数学上册第四章基本平面图形单元测试题含解析

人教版七年级数学上册第一章有理数单元检测题解析版
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页