
低电压穿越控制技术.
22页
1、电网正常条件下双馈风力发电变换器的控制技术DFIG变速恒频运行,通过控制转子侧和网侧变换器来实现有功、无功功率的独立调节。转子侧变换器的主要作用是为转子提供励磁电流,而励磁电流可以分为励磁分量和转矩分量两部分。其中调节励磁电流分量可调节定子侧所发出的无功功率,调节转矩电流分量控制电磁转矩,进而控制定子侧所发出的有功功率,使风力机运行在最佳功率曲线上,实现最大风能捕获。风速的变化会引起双馈发电机运行状态的变化,进而导致直流侧电流的变化,从而引起直流侧电压的变化。直流侧电压的变化会引起整个风力发电系统的性能恶化,所以网侧变换器的主要控制目标就是保持直流侧电压恒定而不受上述因素的影响,同时又可以控制功率因数。网侧变换器的另一任务是保证其良好的输入特性,即输入电流波形接近正弦,谐波含量少,功率因数符合要求,理论上可获得任意可调的功率因数,为整个风电系统的功率因数控制提供了另一种方法。 双馈风力发电系统是一个多变量、时变、强耦合的高阶非线性系统,其运行控制复杂。目前对于理想电网电压条件下DFIG风力发电机系统、包括网侧、转子侧变换器的控制策略业已进行了大量的研究工作Error! Referenc
2、e source not found.。如经典的矢量控制(Vector Control-VC)和直接转矩控制(Direct Torque Control-DTC)在DFIG风电机组得到广泛应用。矢量控制根据定向方式的不同又可分为电压定向(SVO-VC)和磁链定向(SFO-VC)。而针对网侧变换器而言,变换器的控制就可以分为基于电网电压定的矢量控制(VOC)和直接功率控制(VDPC)以及基于虚拟磁链定向的矢量控制(VFOC)和直接功率(VFDPC)控制四种。1 矢量控制由于DFIG是个多变量、非线性、强耦合的被控对象,采用参数重构和状态重构的现代控制理论概念可以实现交流异步电动机定子电流的励磁分量和转矩分量之间的解耦,即磁通和转矩之间的解耦,将整个系统分解为两个独立控制的子系统。实现了将交流电动机的控制过程等效为直流电动机的控制过程,使交流调速系统的动态性能得到了显著的提高和改善。因此,对双馈电机而言,采用矢量控制是极具有吸引力的,无论双馈电机是作为电动机运行还是作为发电机运行,根据不同的控制目标,可以实现速度和定子无功功率(或磁通)的解耦控制或者定子端口无功功率和有功功率的解耦控制。其
3、控制方程为: (1-1)目前,双馈系统中可选择的定向向量有定子磁链、气隙磁链、转子磁链、定子电流和转子电流向量等。如图1-1所示为:DFIG功率解耦的矢量控制框图。图1-1 DFIG功率解耦的矢量控制框图Fig.1-1 The diagram of DFIG power decoupled vector control将矢量控制方法应用到双馈风力发电系统当中,可以大大简化控制策略。矢量控制是通过坐标变换,将定转子的电压、电流、磁链等变换到两相同步旋转坐标系当中,将双馈电机等效为它励直流电动机,从而实现对其转矩、励磁分量或有功、无功功率的解耦控制,具有良好的动态性能和抗干扰能力。以转子侧变换器定子磁链定向矢量控制(SFO-VC)为例,S. Wang和Y. DingError! Reference source not found.等利用气隙磁场定向实现了有功和无功功率的解耦控制,并分析了其稳态性能。这种励磁控制模型忽略了定子漏阻抗和转子漏感,同时近似地认为气隙磁链为常数,使励磁控制模型的精度下降。R.Pen等Error! Reference source not found.提出了并网型
4、定子磁场定向控制的双馈发电机数学模型,背靠背变换器的控制系统构成及设计,以及在电流控制模式和速度控制模式下,获得最大风能跟踪以及有功、无功和转速的独立控制。Arantxa Tapia 等Error! Reference source not found.-30分析了基于并网型定子磁场定向控制的双馈发电机数学模型,定子有功、无功功率的负载曲线,以及系统净有功、净无功、净功率因数与定转子有功、无功及功率因数之间的关系。重庆大学的杨顺昌、廖勇等提出通过控制转子电压向量在动态同步坐标轴系上的投影来实现有功、无功和转速的独立控制。由于定子频率一般为工频,使得在推导励磁控制模型时忽略定子电阻不会带来较大的误差,并且以定子磁场定向时,控制系统可以变得较为简单,但是也存在着定子磁链近似为常数的问题。尽管双馈电机的矢量控制策略有上述局限性,但相对于其它控制策略而言,矢量控制实现起来较为容易,并且具有较强的鲁棒性,如果采用定子电压定向,其电压向量角的获得也较为容易,因此矢量控制策略目前在双馈电机的控制系统中应用较为广泛。双馈电机稳态数学模型发电机作为风力发电系统的重要设备,其动态性能直接关系到风力发电机所
《低电压穿越控制技术.》由会员jiups****uk12分享,可在线阅读,更多相关《低电压穿越控制技术.》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
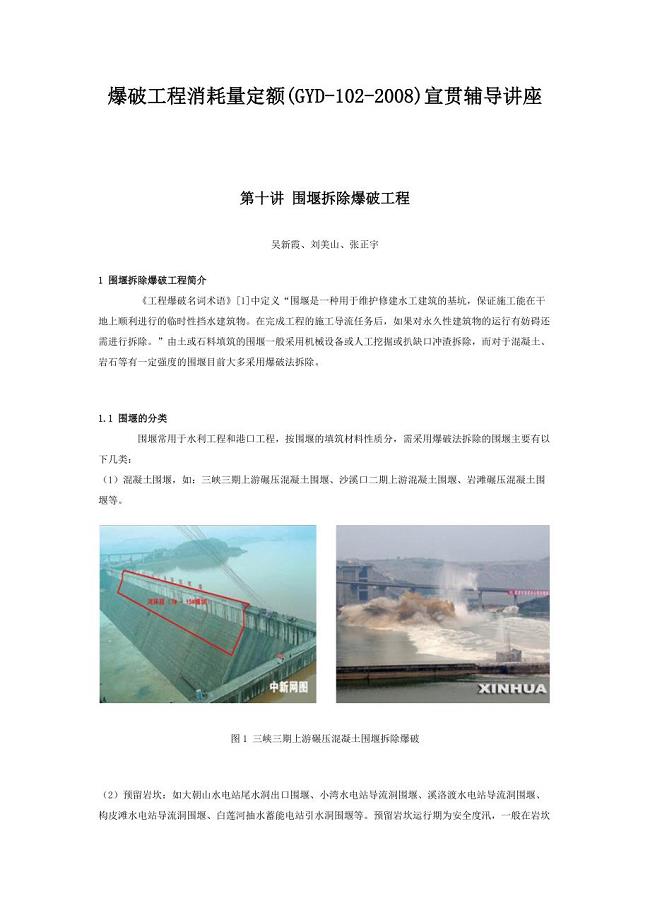
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页