
自动控制原理—第五章控制系统的相对稳定性
11页
1、5.5 控制系统的相对稳定性,在工程实际中,首先要求控制系统必须是稳定的,即系统具有绝对稳定性;同时还存在有稳定程度的问题。当系统处于稳定状态,且接近临界稳定状态时,虽然从理论上讲,系统是稳定的,但实际上,系统可能已处于不稳定状态。其原因可能是在建立系统数学模型时,采用了线性化等近似处理方法;或系统参数测量不准确;或系统参数在工作中发生变化等。因此要求系统保有一定的相对稳定性(稳定裕度),这样才可以保证不致于分析设计过程中的简化处理,或系统的参数变化等因素而导致系统在实际运行中出现不稳定的现象。,稳定裕度是衡量闭环系统的相对稳定程度的指标,也是系统的频域指标,与闭环系统的瞬态响应有关。对于最小相位系统(条件稳定系统除外),开环系统传递函数没有极点位于右半s平面,那么闭环系统稳定的充要条件是:开环系统幅相频率特性不包围(-1,j0)这一点, 系统开环奈氏曲线与负实轴的交点应该在(-1,j0)点以右。由上一节的内容可知,开环奈氏曲线与负实轴的交点越靠近(-1,j0)点,系统的阶跃响应的振荡就越强,相对稳定性也越差。在讨论一个系统的稳定裕度时,是根据系统在稳定状态下,接近临界状态的程度来反映
2、的。在频率分析方法中,对于开环稳定的系统,就是根据开环频率特性曲线接近(-1,j0)点的程度来表征。在控制系统的实际应用中,要求系统具备相当的稳定裕度,通常用相位裕度、幅值裕度两个指标来衡量系统的相对稳定性。,5.5.1系统相对稳定性的表述,从对比中不难看出:两个具有不同闭环主导极点的系统A和系统B,从时域分析的角度来看,系统A的闭环主导极点较系统B更远离虚轴,系统A较系统B具有更好的稳定性;从两个系统对应的频率特性曲线来看,系统B的频率特性曲线较系统A更靠近(-1,j0)点,系统B的稳定程度就稍低。,5.5.2幅值穿越频率c与相位穿越频率g,1. 幅值穿越频率c:在波德图上穿越0分贝线时所对应的频率,有L(c)=20lgA(c)=0;在开环奈氏图上对应于与单位圆相交的那一点,有A(c)=|G(jc)|=1。 2. 相位穿越频率g:在波德图上穿越-180相位时所对应的频率,有(g)=-180;在开环奈氏图上对应于与负实轴相交的那一点,仍有(g)=-180。,从奈氏图上衡量系统的相对稳定性,5.5.3相位裕度,在系统幅值穿越频率c处,使系统达到临界稳定状态所需的附加相位滞后角称为相位裕度
《自动控制原理—第五章控制系统的相对稳定性》由会员小**分享,可在线阅读,更多相关《自动控制原理—第五章控制系统的相对稳定性》请在金锄头文库上搜索。
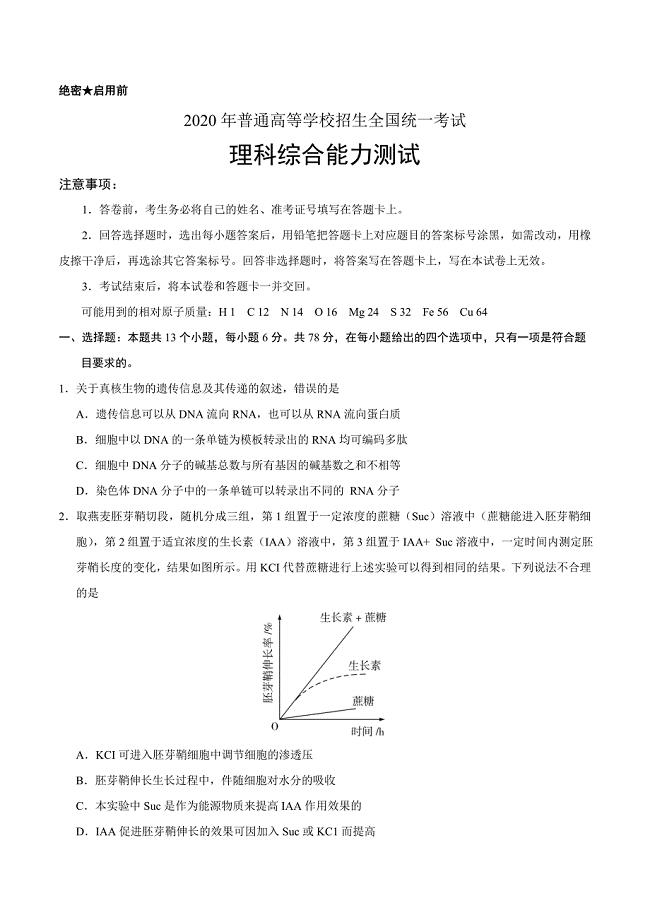
2020年高考真题——理科综合(全国卷Ⅲ)+Word版含答案
2021年绝味鸭脖策划书
2021年熟食店创业方案
2021年熟食店开店策划
2021年卤菜店创业计划书
2021年周黑鸭网络营销策划方案
东大21年1月考试《现代设计方法》考核作业

谈我国行政管理效率的现状及其改观对策(论文)
单证员考试-备考辅导-复习资料:无贸易背景信用证案分析.docx

土木工程毕业生答辩自述.docx

建筑学毕业后工作状态真实写照.doc
C#代码规范(湖南大学).doc
xx区食药监局2019年工作总结及2020年工作计划

2019年中医院药物维持治疗门诊工人先锋号先进事迹

2019年度xx乡镇林长制工作总结
2019年性艾科工作计划书

2019年人才服务局全国扶贫日活动开展情况总结

关于组工信息选题的几点思考

摘了穷帽子 有了新模样

2019年某集团公司基层党支部书记培训班心得体会
 通过数据分析提升商超营销效果
通过数据分析提升商超营销效果
2024-01-30 30页
体育场馆销售力量的培训课程
2024-01-30 30页
商超营销中的市场竞争和竞争优势
2024-01-30 21页
如何有效监控和评估旅行社营销效果
2024-01-30 23页
目标市场分析及策略制定
2024-01-30 25页
旅行社与旅游相关行业的合作与营销
2024-01-30 29页
开展市场调研与反馈机制
2024-01-30 27页
体育场馆营销策划与执行的关键要素
2024-01-30 23页
提升商超员工服务意识的培训
2024-01-30 31页
提高商超店面管理与运营效率的培训
2024-01-30 15页