
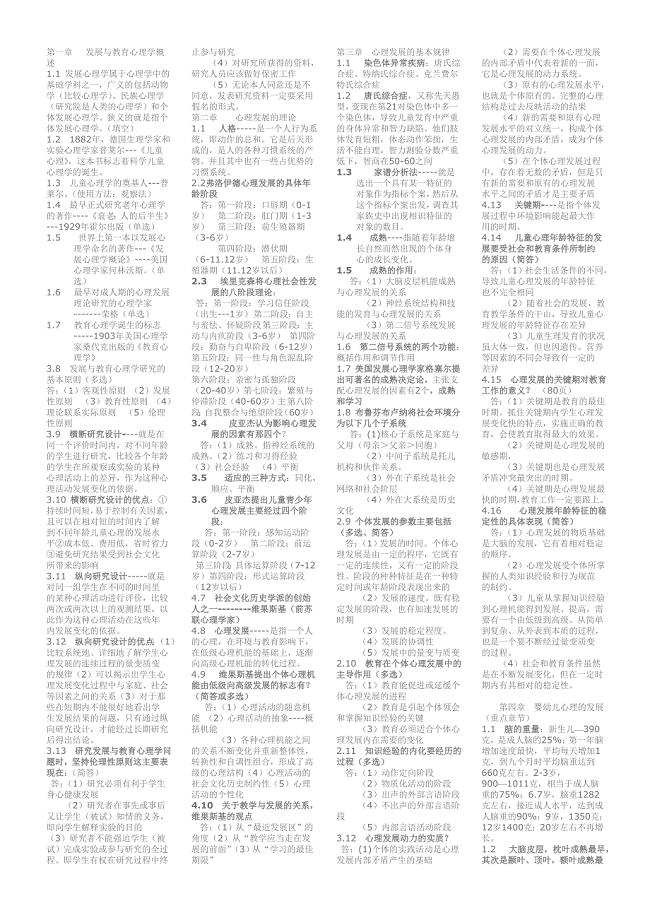
刚性攻丝参数
5页
1、排序方式:先发表的文章置前后发表的文章置前编号:16582 类型:原创 时间:2005-2-28 17:26:04作者:okquinn 级别:*用户文章:76頃0I-MB刚性攻牙相关参数精华0i-MB參數說明參考設定值備註 3706#03706#1 主軸與 POSITION CODER 齒比 0,01: 15200#1 主軸與 POSITION CODER 齒比設定 0: NO.3706#1,01 : N0.52215224, NO.52315234 0 5200#4攻牙旋出進給率設定0無效 5201#0平滑剛性攻牙1有效 5201#2攻入、旋出加減速時間設定 0:NO.526152641:NO.52615264, NO.52715274 05201#3攻牙旋出進給率增量單位0: 1%1: 10% 0 5202#0剛性攻牙前先做主軸定位1有效 5210剛性攻牙指令碼29 5211攻牙旋出進給率100 100% 5221低檔主軸側齒數(GR10=1) 0 5222中檔主軸側齒數(GR20=1) 0 5223高檔主軸側齒數(GR30=1) 0 5231低檔馬達側齒數(GR10=1) 0 5
2、232中檔馬達側齒數(GR20=1) 0 5233高檔馬達側齒數(GR30=1) 05241 (低檔)5242(中檔)5243(高檔)剛性攻牙之主軸上限值3000 5261低檔攻入(旋出)加減速時間(GR10=1) 1200 5262中檔攻入(旋出)加減速時間(GR20=1) 1200 5263高檔攻入(旋出)加減速時間(GR30=1) 1200 5271低檔旋出加減速時間設定(GR10=1) 0 5272中檔旋出加減速時間設定(GR20=1) 0 5273高檔旋出加減速時間設定(GR30=1) 0 5280 Z軸位置迴路增益25005281低檔位置迴路增益(GR10=1) 2500 5282中檔位置迴路增益(GR20=1) 2500 5283高檔位置迴路增益(GR30=1) 2500 5300 Z軸檢測寬度30 5301主軸檢測寬度305310 Z軸移動中位置偏移量32000 5311主軸移動中位置偏移量32000 5312 Z軸停止中位置偏移量500 5313主軸停止中位置偏移量500 5321 5323剛性攻牙主軸背隙補償0 4000#0主軸和馬達轉動方向0:同向1:反向0 40
3、01#4主軸和主軸外部檢出器轉動方向0:同向1:反向0 4002#3,2,1,0主軸外部檢出器型式0,0,0,1以馬達速度檢出器作位置回饋4003#0 主軸定位方式 0 POSITION CODER4003#3,#2主軸定位旋轉方向皮帶式:1,0齒輪式:1,11,0固定 正轉4003#7,6,5,4主軸外部檢出器齒數0,0,0,0 256入/rev 4004#2外部一回轉信號1使用4004#3外部一回轉信號檢出邊緣設定0上緣4006#1齒數比解析度選擇1 *10004010#2,1,0主軸馬達檢出器型式0,0,0 Mi sensor 4011#2,1,0主軸馬達檢出器齒數0,1,0 256入/rev 4016#7位置控制模式(主軸定位)是否每次檢杳外部一回轉信號 1每次檢查4038主軸定位速度1004044高檔速度迴路比例增益(CTH1A=0) 20(10)4045低檔速度迴路比例增益(CTH1A=1) 20(10)4052高檔速度迴路積分增益(CTH1A=0) 100(10)4053低檔速度迴路積分增益(CTH1A=1) 100(10)4056 高檔齒數比(CTH1A=0,CTH2A
4、=0) 7384057 中高檔齒數比(CTH1A=0,CTH2A=1) 7384058 中低檔齒數比(CTH1A=1,CTH2A=0) 7384059 低檔齒數比(CTH1A=1,CTH2A=1) 7384060主軸定位之高檔位置迴路增益(CTH1A=0,CTH2A=0) 1000 4061主軸定位之中高檔位置迴路增益(CTH1A=0,CTH2A=1) 1000 4062主軸定位之中低檔位置迴路增益(CTH1A=1,CTH2A=0) 1000 4063主軸定位之低檔位置迴路增益(CTH1A=1,CTH2A=1) 10004065 高檔位置迴路增益(CTH1A=0,CTH2A=0) 25004066 中高檔位置迴路增益(CTH1A=0,CTH2A=1) 25004067 中低檔位置迴路增益(CTH1A=1,CTH2A=0) 25004068 低檔位置迴路增益(CTH1A=1,CTH2A=1) 2500 4085馬達電壓設定(%)(高速線圈用)704099馬達激磁延遲時間3004137馬達電壓設定(%)(低速線圈用)704171高檔主軸側齒數(CTH1A=0) 484172高檔馬達側齒數(
《刚性攻丝参数》由会员ni****g分享,可在线阅读,更多相关《刚性攻丝参数》请在金锄头文库上搜索。
发展与教育心理学00466资料
上半年学期班级工作计划范文
《名人故事》读后感
混凝土基础及垫层施工方案
2023年二级建造师法律法规真题解析
班后总结也重要
2022年专业技术人员继续教育工匠精神读本考试满分答案
大连理工大学21秋《船舶制图》在线作业三答案参考70
防水工程施工合同3
吉林大学21秋《国际商务管理》平时作业二参考答案75
中学家长会邀请函范文2022
宽带问题处理方法
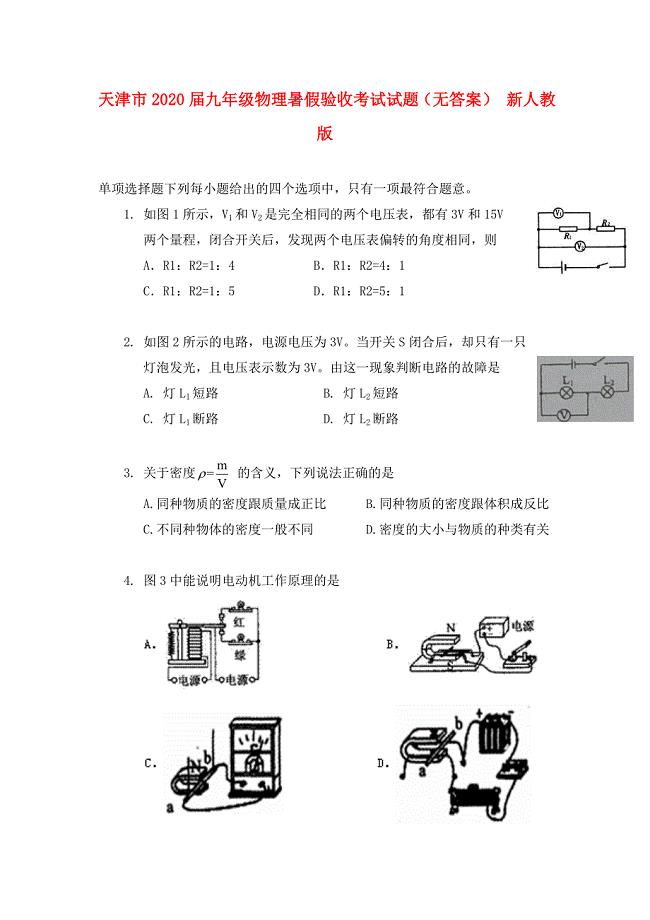
天津市九年级物理暑假验收考试试题无答案新人教版
普外科实习心得体会
高二班主任工作计划下学期模板(2篇).doc
区域经理个人工作总结范文(2篇).doc
机械设备维护保养制度
建筑材料水泥供货协议(3篇).doc
六一儿童节搞笑幽默短信祝福语1000字
铜仁生物科研试剂技术研发项目建议书(参考范文)
 用户协议条款
用户协议条款
2022-08-26 11页
常用温病名方
2023-01-25 19页
轨道电路故障处理
2023-09-13 5页
最新食源性疾病监测表、疑似食源性异常病例报告卡
2024-02-19 4页
小康村建设中存在问题及对策
2024-02-07 5页
课题结题报告
2022-08-07 22页
公路工程质量评比及奖惩办法
2023-09-26 15页
适应审计发展需要提升计算机审计水平
2023-12-04 4页
信息安全检查管理办法
2022-10-05 7页
二维码追溯系统
2023-10-23 38页