
毕业设计(论文)-菠萝采摘机器人结构设计说明书
35页
1、菠萝采摘机器人结构设计摘 要菠萝采摘机器执行器是采摘机器的重要部件,它的设计通常被认为是机器人的核心技术。本次设计首先,调查了采摘机及其末端执行器的研究及发展现况;接着,通过现有菠萝采摘机末端执行器及人工采摘菠萝时原理进行分析,在此分析基础上提出了总体结构方案;其次,对各主要机构及其零件进行设计与选择;然后,通过静力学分析进行了校核。 通过本次设计,巩固了大学所学专业知识,如:机械原理、机械设计、材料力学、公差与互换性理论、机械制图等;掌握了普通机械产品的设计方法并能够熟练使用AutoCAD软件,对今后的工作与生活具有极大意义。关键词:菠萝采摘,执行器,手指,设计全套图纸加扣 3346389411或3012250582AbstractPineapple picking machine actuator is an important part of the picking machine,its design is usually considered as the core technology of the robot.This design first investigates
2、the research and development status of the picking machine and its end-effector; then,through the analysis of the existing pineapple picking machine end-effector and the principle of artificial picking pineapple,the overall structure scheme is put forward based on the analysis; secondly, the main mechanisms and their parts are designed and selected; and then,through static analysis,the checking is carried out.Through this design,we have consolidated our professional knowledge,such as mechanical
3、principle,mechanical design,material mechanics,tolerance and interchangeability theory,mechanical drawing,etc. We have mastered the design method of ordinary mechanical products and can skillfully use AutoCAD software,which is of great significance to our future work and life.Key words: Pineapple picking,Actuator,Finger,Design目 录摘 要1Abstract2第一章 绪论41.1课题研究背景及意义41.2 国内外采摘机器发展现况41.3 采摘机器末端执行器研究现状5第二章 总体方案确定72.1设计要求72.2总体方案设计72.2.1车体方案设计72.2.2手臂方案设计72.2.3手爪方案设计7第三章 车体部分设计93.1驱动机构的设计93.1运动分析93.1.1跨越
4、坑洼93.1.2 跨越沟槽103.3.3 斜坡运动分析113.2主电机的选择123.3机械手臂部分设计143.3.1电机的选择143.3.2大、小臂设计16第四章 手爪部件的设计与选择184.1驱动机构的设计184.1.1驱动方案的选择184.1.2电动机的选择184.1.3丝杆螺母副的选型与校核204.1.4轴承的选择与校核234.1.5键的选择与校核234.2手指结构设计244.2.1手指数量244.2.2手指关节数量244.2.3手指的材料244.3机架的设计24第五章 力学分析与校核265.1手指的工作原理265.2抓取时的静态力学模型265.3运动学分析285.4夹持误差计算29总 结32参考文献33致 谢33第一章 绪论1.1课题研究背景及意义菠萝是中国的主要水果。2010年,菠萝总产量占三大水果水果(菠萝、橘子、梨)的32.73%。此外,我国菠萝种植面积2848亩,产量26万吨,占世界菠萝种植面积的35%,产量是世界上最大规模的菠萝采摘机器人采摘工艺。在很大程度上可以大大提高采果效率,节约成本,但采果过程中的机械损伤是一种侵入性病原微生物。造成误差的主要原因是运行负荷的碰
《毕业设计(论文)-菠萝采摘机器人结构设计说明书》由会员M****1分享,可在线阅读,更多相关《毕业设计(论文)-菠萝采摘机器人结构设计说明书》请在金锄头文库上搜索。
江苏全日制劳动合同文本
小升初考试的自我介绍范文.doc
EMP系统说明书
【X庚短篇集】(源庚、浩庚、13庚、海庚、范庚)
吉林大学21秋《液压与气压传动》平时作业一参考答案72
离职申请书模板九篇
全国一级建造师执业资格考试模拟试卷建设工程法规及相关知识
珍珠钻石金手指大全(完整版)实用资料
医疗司法鉴定.doc
能量房功能介绍及使用说明
2022年边防检查员个人述职报告
销售实习个人总结

职校班主任工作总结
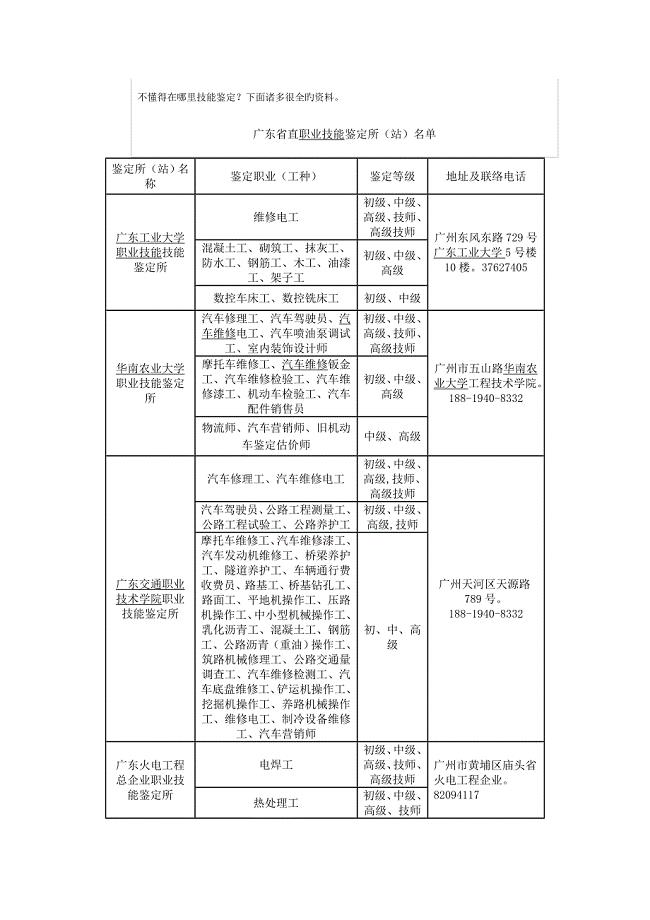
广东省职业技能鉴定所最全最新鉴定机构
教师个人师德工作计划参考范文(3篇).doc
财务述职范文集锦六篇
2016年上半年山东省基础医学基本知识和临床护理基础知识考试试题
精选未来的书包三年级作文4篇(小学生作文未来的书包)
农业品区域性品牌构建原理
建材业务流程管理
 毕业论文-浅谈中小企业电子商务实务概况
毕业论文-浅谈中小企业电子商务实务概况
2023-02-09 5页
屈臣氏库存管理现状分析
2024-01-03 17页
毕业设计(论文)-上海市某综合楼中央空调设计
2023-10-31 104页
《计算机网络》课程设计报告-JAVA嘟嘟聊天工具
2022-07-28 41页
毕业设计(论文)-多功能播种机设计(主结构及排种覆土部分)
2024-01-12 31页
最小二乘法在解决实际问题中的应用
2024-01-30 8页
保险公司投资风险及其管理探析
2024-01-04 2页
基于J2EE的智能餐桌商务服务系统的设计与开发计算机专业
2023-06-19 83页
毕业设计(论文)-轮式装载机总体方案及其液压系统设计
2023-02-07 55页
毕业设计(论文)-基于PLC及MCGS组态的饮料灌装控制系统设计
2023-01-13 75页