
AX-12数字舵机工作原理
6页
1、 整理的AX-12 资料 控制原理 程序 : 时间仓促。弄的不是很整齐,有什么问题,请直接联系我 !概述:Dynamixel系列机器人驱动器是一个很流行模块化的驱动器,其由齿轮减速器、精密直流电机和具有串联功能的电路板分别单一封装组成。尽管它体积小巧紧凑,但它可以产生很大扭矩,加上高品质材料制造并具有一定的强度,可以抵御一定外部冲击。它具有检测内部温度功能,例如改变内部温度和供电电压。AX-12+数字伺服电机不像一般的R/C微伺服电机(舵机)使用PWM(脉冲宽度调制)控制,其需要使用CM-5 Dynamixel AX12+伺服电机专用控制器控制。当用做关节电机时,可以旋转0300;当用作轮子驱动时,可以选择360连续旋转模式。更重要的是AX-12+提供了高达16kgcm的扭矩,是一般数字舵机的2倍。下面是AX-12舵机的主要技术参数:AX-12+规格参数:1.重量:55g2.齿轮减速比:1/2543.扭矩:12kgcm(7V);16.5kgcm(10V)4.速度:0.269秒/60度(7V);0.196秒/60度(10V)5.最小分辨率:0.356.最大运行角度:300(有位置控制);
2、360连续旋转(无位置控制)7.电压:7V10V (推荐供电:9.6V)8.最大电流:900mA9.工作温度:-5 +8510.控制信号:数字信号11.通讯协议:半双工异步串行通信12.通讯设置:(数据位8、停止位1、无奇偶效验)13.Link 方式:TTLDaisy总线14.ID数:254ID (0253)15.通讯速率:7343bps 1 Mbps16.反馈:位置、温度、负载、电压17.材质:工业塑料18.报警功能:当内部温度、扭矩、供电电压超过额定范围时,电机主动反馈实时情况。此种紧急状况,电机会闪动LED指示灯或停止输出扭矩。二工作原理:(1) 硬件电路:要使舵机运行,主控制器必须具备合适TTL电平的半双工异步串行通道。 推荐使用Dynamixel(就是舵机生产商的名字)控制器CM-5. 在这里,我们不使用CM-5 ,而用ARM处理器直接控制AX-12。所以我们需要知道它的内部协议。(2) 软件: 从DATASHEET中得知:AX-12 的指令总表如下 翻译下:指令功能代码参数个数PING获取舵机状态数据包0x010READ DATA读取舵机RAM的信息0x022WRITE D
3、ATA写ROM或RAM的一个字节0x032REG WRITEACTION激活下同上0x042ACTION引起REG WRITE触发命令0x050RESET复位0x060SYNC WRITE控制舵机舵机同时转动0x834 在这里,我们只用RESET 和 SYNC WRITE 这2个指令!下面分别介绍着2个指令:(1) 复位(RESET)Function Changes the control table values of the Dynamixel actuator to the Factory Default Value settings Length 0X02 Instruction 0X06 Parameter NONE Example 4 Resetting the Dynamixel actuator with an ID of 0 Instruction Packet : 0XFF 0XFF 0X00 0X02 0X06 0XF7函数功能:将所有舵机RAM ,ROM的内容恢复到出厂状态长度: 0x02指令值: 0x06参数: 无处理器发送指令 :0XFF 0XFF 0X00
《AX-12数字舵机工作原理》由会员鲁**分享,可在线阅读,更多相关《AX-12数字舵机工作原理》请在金锄头文库上搜索。
软件程序员的转正申请书
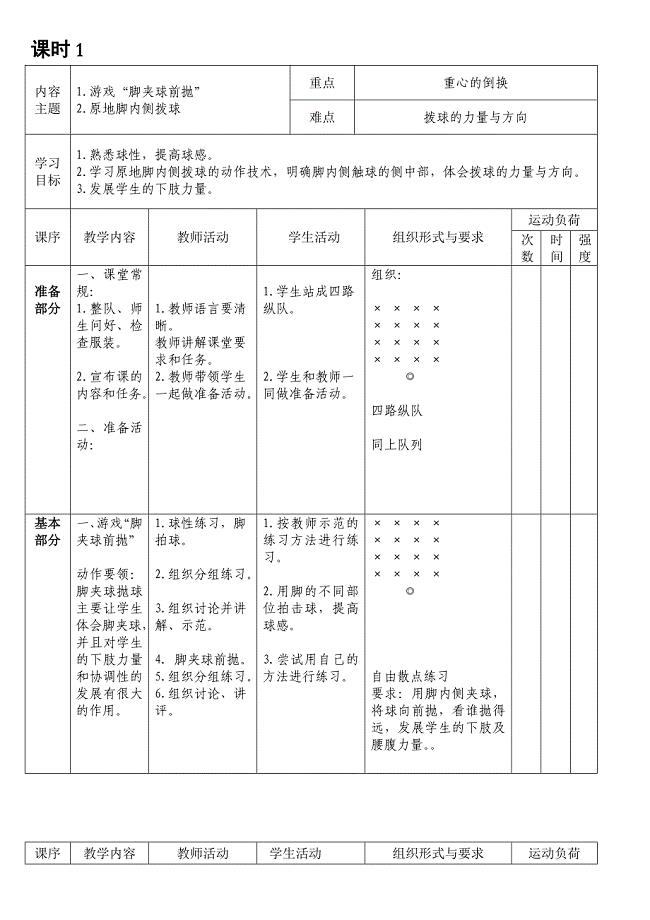
足球课教案1
合同管理制度制定依据.doc

安徽省蚌埠市高三第二次3月教学质量检查数学理试题
拉货宝20性能测试脚本用例
看书暑假日记模板500字
2022公司股权转让协议书范文七篇
农业种植业科上半年工作总结
赠与协议电子范文(五篇).doc
湖南关于成立精准自走式施药机械公司可行性研究报告(DOC 87页)
最新社区治理和服务创新工作精选
连云港数字农业设备项目投资计划书
西安车辆厂ERP信息化应用案例
2023年商城装修管理规定3篇
知法守法创造美
大连市关于劳动关系调转若干知识
2023年年度安全保卫工作自查报告范本合集
森林防火工作会议讲话稿县长
常见材料学专业名词中英文对译
三年级人教新起点英语下册按要求写句子课堂知识练习题
 机电安装工程施工方案3171995632
机电安装工程施工方案3171995632
2023-07-04 28页
玻璃钢夹砂管项目可行性研究报告【备案申请版】
2023-11-05 101页
2019年全县生态环境保护大会发言材料.docx
2023-07-01 3页
微型计算机控制技术课后答案
2024-02-11 22页
专用车生产线项目可行性研究报告-前景分析
2022-11-21 15页
数据库试验答案
2022-10-31 53页
在全市医疗纠纷人民调解工作会上的讲话.docx
2023-01-04 7页
2020年文明单位建设工作实施方案
2023-10-25 7页
舞泡网络店铺转让居间合同
2023-10-19 8页
厂房租赁安全管理责任书
2023-08-27 5页