
地铁施工中盾构机姿态定位测量点研究
6页
1、地铁施工中盾构机姿态定位测量点研究摘要:结结合南京京地铁一一号线两两个区间间段地下下隧道贯贯通的测测量实践践,简明明地介绍绍了地铁铁建设中中各种测测量过程程,并着着重对盾盾构机姿姿态定位位中的测测量工作作作了深深入细致致的研究究,阐述述了盾构构机自动动导向系系统姿态态定位测测量的原原理和方方法,以以及如何何使用人人工测量量的方法法来检核核自动导导向系统统的准确确性,分分析了盾盾构机姿姿态定位位检测的的情况。关键词词:地铁铁;自动动导向系系统;盾盾构1 概述述随着城城市建设设的飞速速发展,我国在在各大城城市都开开展了地地铁建设设,为了了满足盾盾构掘进进按设计计要求贯贯通(贯贯通误差差必须小小于550mmm),必必须研究究每一步步测量工工作所带带来的误误差,包包括地面面控制测测量,竖竖井联系系测量,地下导导线测量量,盾构构机姿态态定位测测量四个个阶段。本文主主要以南南京地铁铁南北线线一期工工程的22个区间间隧道的的贯通测测量项目目为背景景,探讨讨了地铁铁隧道施施工中盾盾构机自自动导向向系统定定位测量量的功能能及原理理,并阐阐述了如如何用棱棱镜法来来检核自自动导向向系统的的准确性性。2 盾构
2、构机自动动导向系系统的组组成与功功能现在在的盾构构机都装装备有先先进的自自动导向向系统,本区间间盾构机机上的自自动导向向系统为为德国VVMT公公司的SSLS-T系统统,主要要有以下下四部分分组成:(1)具有自自动照准准目标的的全站仪仪。主要要用于测测量(水水平和垂垂直的)角度和和距离、发射激激光束。(2)ELSS(电子子激光系系统),亦称为为标板或或激光靶靶板。这这是一台台智能型型传感器器,ELLS接受受全站仪仪发出的的激光束束,测定定水平方方向和垂垂直方向向的入射射点。坡坡度和旋旋转也由由该系统统内的倾倾斜仪测测量,偏偏角由EELS上上激光器器的入射射角确认认。ELLS固定定在盾构构机的机机身内,在安装装时其位位置就确确定了,它相对对于盾构构机轴线线的关系系和参数数就可以以知道。(3)计算机机及隧道道掘进软软件。SSLS-T软件件是自动动导向系系统的核核心,它它从全站站仪和EELS等等通信设设备接受受数据,盾构机机的位置置在该软软件中计计算,并并以数字字和图形形的形式式显示在在计算机机的屏幕幕上,操操作系统统采用WWinddowss20000,确确保用户户操作简简便。(4)黄黄色箱子
3、子。它主主要给全全站仪供供电,保保证计算算机和全全站仪之之间的通通信和数数据传输输。3 盾构构机自动动导向定定位的基基本原理理地铁隧隧道贯通通测量中中的地下下控制导导线是一一条支导导线,它它指示着着盾构的的推进方方向,导导线点随随着盾构构机的推推进延伸伸,导线线点通常常建立在在管片的的侧面仪仪器台上上和右上上侧内外外架式的的吊篮上上,仪器器采用强强制归心心(见图图1),为了提提高地下下导线点点的精度度,应尽尽量减少少支导线线点,拉拉长两导导线点的的距离(但又不不能无限限制的拉拉长),并尽可可能布设设近乎直直伸的导导线。一一般两导导线点的的间距宜宜控制在在1500m左右右。盾构机自自动导向向系统的的姿态定定位主要要是依据据地下控控制导线线点来精精确确定定盾构机机掘进的的方向和和位置。在掘进进中盾构构机的自自动导向向系统是是如何定定位的呢呢?它主主要是根根据地下下控制导导线上一一个点的的坐标(即X、Y、ZZ)来确确定的,这个点点就是带带有激光光器的全全站仪的的位置,然后全全站仪将将依照作作为后视视方向的的另一个个地下导导线的控控制点来来定向,这样就就确定了了北方向向,即方方位角。再利用用全
《地铁施工中盾构机姿态定位测量点研究》由会员re****.1分享,可在线阅读,更多相关《地铁施工中盾构机姿态定位测量点研究》请在金锄头文库上搜索。
解读新消费者权益保护法
优秀班主任工作总结
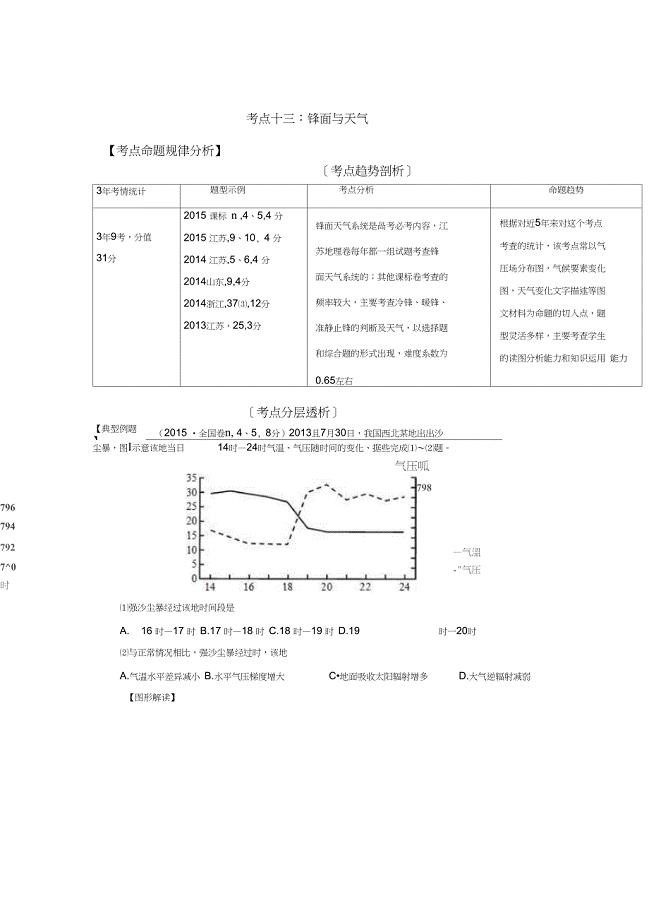
2016年,高考地理,二轮复习,锋面,与天气考点13
土壤污染修复专项技术方案
2023年江苏省卫生健康委员会直属事业单位招考聘用293人(第二批)笔试题库含答案解析
健康教育效果评价报告
《狼牙山五壮士》教学设计 (3)
电子企业精益化管理工具箱
一级建造师考试大纲完整版
2022年山西山大附中晋中学校(晋中市广安中学)教师招考聘用模拟考试练习卷含答案(第7次)
内部控制制度审计评价_内部控制审计与内部控制评价之间的关系与区别3篇监事会对内部审计监督的评价报告
消毒管理办法培训试题
房屋租赁转租协议书参考模板(3篇).doc
信贷信贷业务基础
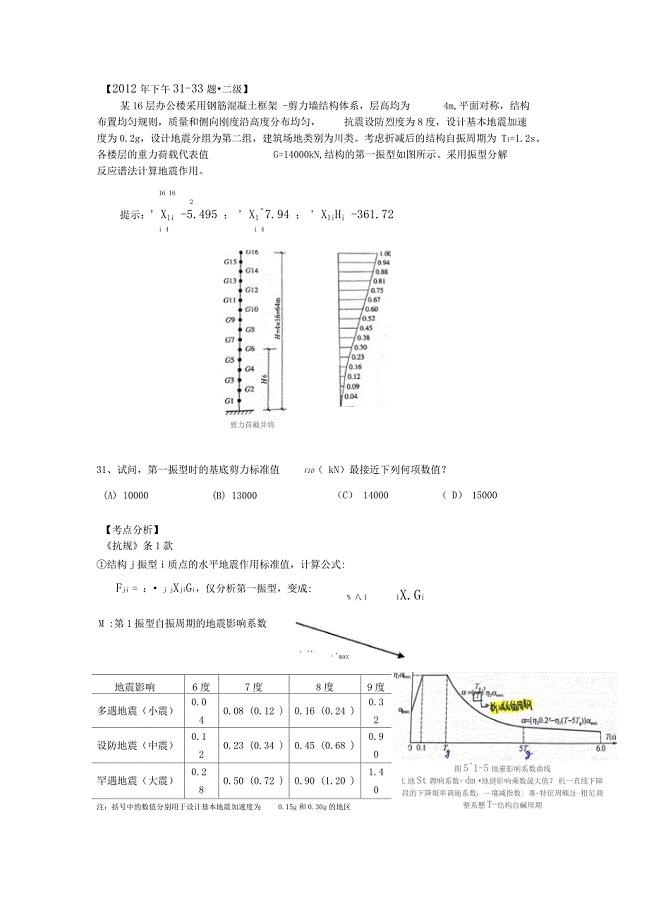
振型分解反应谱法《抗规》7.2.4
民间借贷合同锦集五篇
未到法定结婚龄结婚你应该知道的那些事
顶岗实习报告格式
最应知道的10条心理学规律

净水公司短期实习总结2022
 盐城桩基项目可行性研究报告【模板范文】
盐城桩基项目可行性研究报告【模板范文】
2022-12-25 118页
大班美术喷刷画教案反思
2023-02-17 3页
民政工作人员奖罚制度
2023-12-13 2页
华美国际学校监理规划
2023-08-17 100页
对外贸易依存度的影响因素
2022-12-02 11页
年产xx套割草机器人项目投资价值分析报告
2022-09-25 129页
学校领导班子述职述廉报告
2022-12-26 25页
产品营销与观念营销论述
2022-08-07 21页
试论我国种子产业形势和发展前景我国经济形势发展前景
2023-11-20 7页
人才招聘制度
2024-02-10 5页