
微机原理步进电机实时控制
16页
1、基于步进电机转速实时控制摘要:本设计采用电压为DC12V的四相八拍步进电机35BYJ46型电机,用ULN2003作为步进电动机驱动电路主芯片,以8255A作为8086并行输出接口,8086对步进电机的控制信号则通过8255A送到ULN2003。关于转向与转速,通过查表的方式实现,以逐次递增方向查表,依次输出表中数据,则步进电机正转;以逐次递减方向查表,则步进电机反转,即通过一个表实现步进电机的正转与反转。转速则通过调用延时子程序,当调用延时较长的子程序时,则步进电机转速慢,当调用延时较短的子程序时,步进电机转速加快。关键词: 步进电机;微机原理;实时控制目 录第1章 引言31.1 背景31.2 选题的目的和意义31.3 本课程设计的主要内容3第2章 部件电机转速实时控制42.1 设计方案42.2 硬件系统基本原理42.2.1 系统硬件子系统的构成42.2.2 步进电机工作原理以及与8255接口的关系5 工作原理52.3 软件框图及设计思想7第3章 芯片使用103.1 8255A简介103.2 8255A的工作方式选择103.4 74LS138译码芯片简介11第4章 总结12参考文献13
2、附录 程序清单14第1章 引言1.1 背景传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。当传统电动机的功能已不能满足工厂自动化和办公自动化等各种运动控制系统要求的时候,一系列新的具备控制功能的电动机系统便诞生了。其中应用十分广泛的一类,便是步进电动机。步进电机是一种执行机构,它能将电脉冲转化为角位移。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。预计未来步进电机的研究将会继续深入下去,研究方向之一便是电机与驱动的一体化,从而达到减小体积、提高性能和性价比的目的。1.2 选题的目的和意义步进电机是工业程控及仪表中的主要控制组件之一。在数字控制系统中,由于它可以可以直接接受计算机来的数字元信号,不需要进行数模转换,所以用起来更方便。步进电机角位移与控制脉冲间的精确同步。若将角位移的改变转变为线性位移、位置、体积、流量等物理量的变化,便可实现对它们的控制。正因为步进电机具有快速启
3、停,精确步进以及能直接接收数字量等特点,所以使其在定位场合中得到了广泛的应用。特别在工业程控系统中,使用开环控制模式,微型计算机可以很容易控制步进电机的位置和速度,而不用使用位移传感器,所以应用越来越广泛。学会使用微型计算机控制步进电机也就显得很重有必要了。1.3 本课程设计的主要内容(1)通过步进电机控制系统设计与制作,深入了解与掌握步进电机的运行方式、方向、速度、启/停的控制。(2)学习掌握一般的软硬件的设计方法和查阅、运用数据的能力。第2章 部件电机转速实时控制2.1 设计方案本设计采用电压为DC12V的四相八拍步进电机35BYJ46型电机,用ULN2003作为步进电动机驱动电路主芯片,以8255A作为8086并行输出接口,8086对步进电机的控制信号则通过8255A送到ULN2003。关于转向与转速,通过查表的方式实现,以逐次递增方向查表,依次输出表中数据,则步进电机正转;以逐次递减方向查表,则步进电机反转,即通过一个表实现步进电机的正转与反转。转速则通过调用延时子程序,当调用延时较长的子程序时,则步进电机转速慢,当调用延时较短的子程序时,步进电机转速加快。2.2 硬件系统基本
4、原理2.2.1 系统硬件子系统的构成本设计采用的步进电机为35BYJ46型四相八拍电机,电压为DC12V,其励磁线圈及其励磁顺序如图2-1所示:图2-1 励磁线圈图2.2.2 步进电机工作原理以及与8255接口的关系图2-2 步进电机与8255连接图 工作原理4相步进电机示意图见图2-3,转子由一个永久磁铁构成,定子分别由4组绕组构成。 图2-4 电气连接示意图图2-3 电机定子和转子示意图 2-4 控制电路图当S1连通电源后,定子磁场将产生一个靠近转子为N极,远离转子为S极才磁场,这样的定子磁场和转子的固有磁场发生作用,转子就会转动,正确地S1、S4的送电次序,就能控制转子旋转的方向。例如:若送电的顺序为S1闭合断开S2闭合断开S3闭合断开S4闭合断开,周而复始的循环,在定子和转子共同作用下,电机就瞬时针旋转,见图2-5:图2-5 电机顺时针旋转示意图若送电的顺序为S4闭合断开S3闭合断开S2闭合断开S1闭合断开,周而复始的循环,则电机就逆时针旋转,原理同理,见图2-5。图2-6 8255A向步进电机发出的控制脉冲图2.3 软件框图及设计思想据步进电机的励磁顺序列写控制步进电机顺序转
《微机原理步进电机实时控制》由会员博****1分享,可在线阅读,更多相关《微机原理步进电机实时控制》请在金锄头文库上搜索。
2022年秘书部工作计划及目标
市政排水、路基、结构施工组织内容
2022年人教版课程标准实验教科书数学二年级上册教学问题研讨 (I)
2023年小学数学研修工作总结
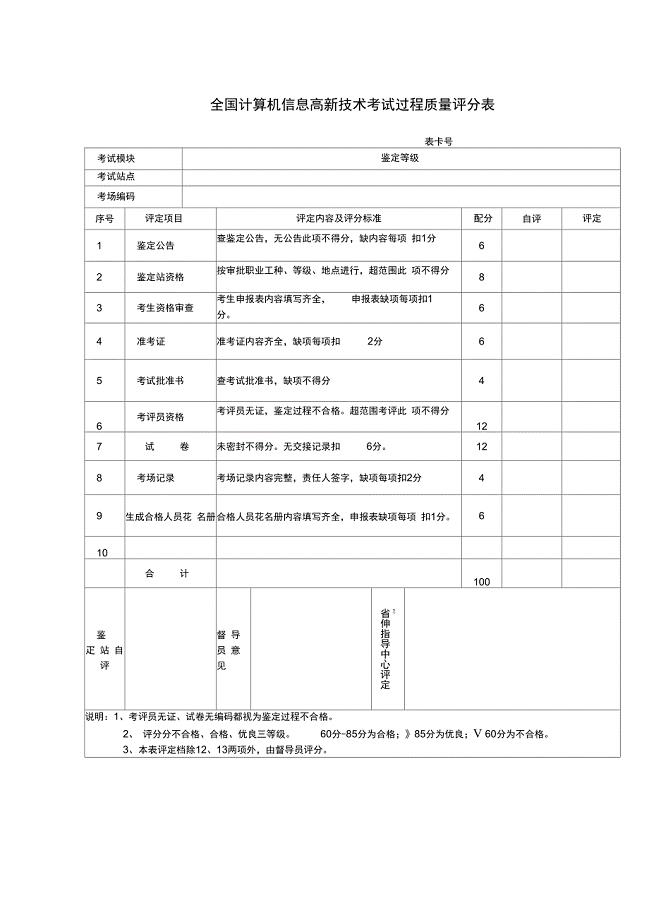
全国计算机信息高技术考试过程质量评分表
英语面试三大技巧
公司计划生育工作计划(三篇).doc

上饶卤制品技术应用项目投资计划书(模板参考)
Heyouqi八年级下册第一单元教案
![《红高粱》读后感[沐风教育]](https://union.152files.goldhoe.com/2024-1/8/8410ca8d-2d0f-441b-94b9-11339843cbf6/pic1.jpg)
《红高粱》读后感[沐风教育]
深圳房屋租赁合同经典版(七篇)
员工岗前消防安全教育培训记录
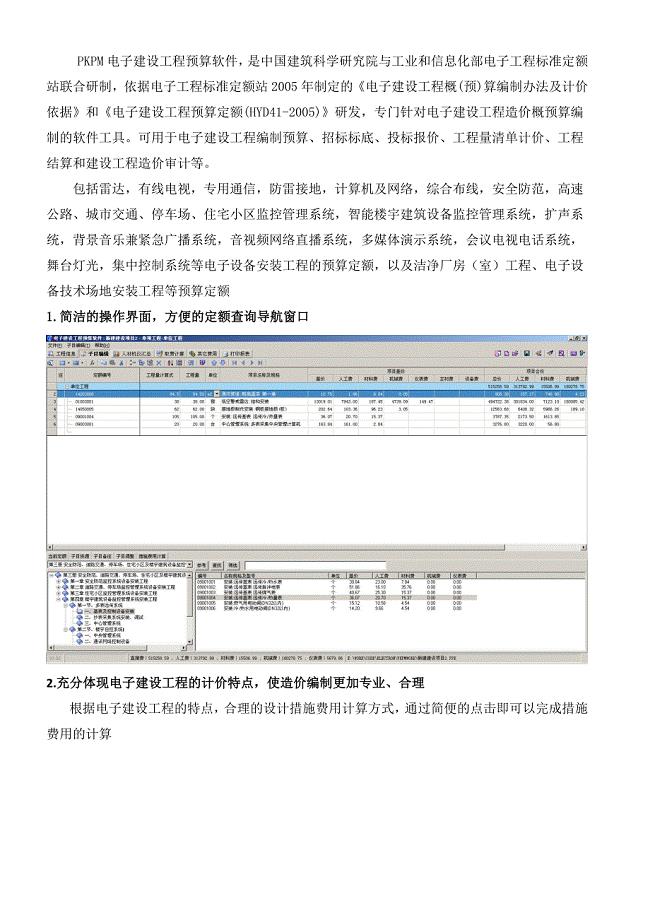
PKPM电子建设工程预算软件
城市道路绿地景观设计
2013年高考生物必背知识点人类遗传病与优生
小班社会我叫轻轻教案反思
托福独立口语快速提炼观点技巧实例讲解共7篇托福独立口语高分技巧
医药卫生服务改革工作计划.doc
【施工管理】排水沟施工组织设计
山东省章丘市届高三第二次模拟考试数学试题(文)含答案
 医院医保管理制度标准模板
医院医保管理制度标准模板
2023-03-02 25页
各类酒店工程造价估算(完整版)
2023-04-25 22页
线性分析与非线性分析的区别
2023-04-14 5页
公路工程隧道爆破专项施工方案(标准版)
2022-08-11 43页
【施工管理】排水沟施工组织设计
2024-01-31 15页
劳务分包(二次结构)
2023-03-10 12页
创新思路加快招商引资工作的思考
2022-12-15 6页
公务员培训个人总结范文
2022-09-22 9页
苹果种植地形条件
2022-10-07 7页
功能性低聚糖与人类健康
2024-02-20 7页