
最新机电一体化技术
25页
1、精品文档 目录 机电一体化技术第 1 章习题-参考答案 11- 1 试说明较为人们接受的机电一体化的含义。 11- 4 何谓机电一体化技术革命? 11- 7.机电一体化系统有哪些基本要素组成?分别实现哪些功能? 11- 8.工业三大要素指的是什么? 11- 12.机电一体化系统的接口功能有哪两种? 11- 16.什么是机电互补法、融合法、组合法? 1机电一体化技术第 2 章习题-参考答案 22- 1 设计机械传动部件时,为确保机械系统的传动精度和工作稳定性,常常提出哪些 要求? 22- 2 机电一体化系统传动机构的作用是什么? 22- 3 机电一体化系统(产品)对传动机构的基本要求是什么? 22- 10现有一双螺母齿差调整预紧式滚珠丝杠,其基本导程入0=6mm、一端的齿轮齿 数为 100、另一端的齿轮齿数为 98,当其一端的外齿轮相对另一端的外齿轮转过 2 个齿时,试问:两个螺母之间相对移动了多大距离? 2216 各级传动比的分配原则是什么?输出轴转角误差最小原则是什么? 22 17已知:4级齿轮传动系统,各齿轮的转角误差为1=A2=A3=0.005 rad,各 级减速比相同,即?1=
2、?2=八=?4=1.5。求:该传动系统的最大转角误差max;为缩小 max,应采取何种措施? 22 18 谐波齿轮传动有何特点?传动比的计算方法是什么? 32- 19.设有一谐波齿轮减速器,其减速比为100 ,柔轮齿数为100.当刚轮固定时,试求该 谐波减速器的刚轮齿数及输出轴的转动方向(与输入轴的转向相比较) 32-20.齿轮传动的齿侧间隙的调整方法有哪些? 32- 25.轴系部件设计的基本要求有哪些? 4机电一体化技术第3 章参考答案 53- 1 简述机电一体化系统执行元件的分类及特点。 5 II3- 2 机电一体化系统对执行元件的基本要求是什么? 53- 3 简述控制用电动机的功率密度及比功率的定义。 53 5 直流伺服电机控制方式的基本形式是什么? 53- 6简述PWM直流驱动调速,换向的工作原理。6步进电机具有哪些特点? 6简述步进电机三相单三拍的工作原理? 63- 11 简述步进电机步距角大小的计算方法? 73- 12 简述三相步进电机的环形分配方式? 7简述步进电机驱动电源的功率放大电路原理7机电一体化技术第4 章参考答案 9试说明 CPU、 MC 和 MCS 之关系。
3、94- 3、在设计微机控制系统中首先会遇到的问题是什么? 94- 17 试说明光电耦合器的光电隔离原理。 94- 20 试说明检测传感器的微机接口基本方式。 9机电一体化技术第 5 章参考答案 11精品文档精品文档5- 2 简述采样定理? 115- 3 简述数字控制系统 A/D 转换过程。 115- 5 简述多输入多输出系统的静力学方程。 115-6 简述两自由度机器人逆动力学方程。 12机电一体化技术第 7 章参考答案 137-3 机电一体化系统中的典型负载有哪些?说明以下公式的含义: 137-4设有一工作台x轴驱动系统,已知参数为下表中所列,已知mA=400 kg, Ph=5mm,Fl水平=800N, Fl垂直=600N,工作台与导轨间为滑动摩擦,其摩擦系数为 0.2,试求转换到电动机轴上的等效转动惯量和等效转矩。 137-5.简述机电一体化系统的数学模型建立过程。比例环节(P)、积分环节(I)、比例- 积分环节(PI)和比例-积分-微分调节(PID )各有何优缺点? 147-8 何谓机电一体化系统的“可靠性”? 171机电一体化技术第 1 章习题-参考答案1-1 试说明较为人们接
4、受的机电一体化的含义。答:机电一体化乃是在机械的主功能、动力功能、信息功能和控制功能上引进微电子技 术,并将机械装置与电子装置用相关软件有机结合而构成系统的总称。1-4 何谓机电一体化技术革命?答:将微型计算机等微电子技术用于机械并给机械以“智能”的技术革新潮流可称 “机电一体化技术革命”。1 -7. 机电一体化系统有哪些基本要素组成?分别实现哪些功能?答:机电一体化系统(产品)要素 功能控制器(计算机等) 控制(信息存储、处理、传送) 检测传感器 计测(信息收集与变换)执行元件 驱动(操作)动力源 提供动力(能量)机构 构造1-8.工业三大要素指的是什么? 答:物质、能量、信息。1-12.机电一体化系统的接口功能有哪两种?答:一种是变换、调整;另一种是输入/输出。1-16.什么是机电互补法、融合法、组合法? 答:机电互补法又称取代法。该方法的特点是利用通用或专用电子部件取代传统机械产品 (系统)中的复杂机械功能部件或功能子系统,以弥补其不足。融合法它是将各组成要素有机结合为一体构成专用或通用的功能部件(子系统),其要 素之间机电参数的有机匹配比较充分。组合法它是将结合法制成的专用或通
《最新机电一体化技术》由会员M****1分享,可在线阅读,更多相关《最新机电一体化技术》请在金锄头文库上搜索。
2023个人租房协议书范文(五篇).doc
2013广东高考模拟试题(文综地理部分)
小学六年级数学小升初毕业试卷及答案.doc
兴业银行的主要业务特点
日常时间安排表
骆驼祥子读书心得精选
2023长期供货合同.doc
专利权转让协议书参考范本(十一篇)
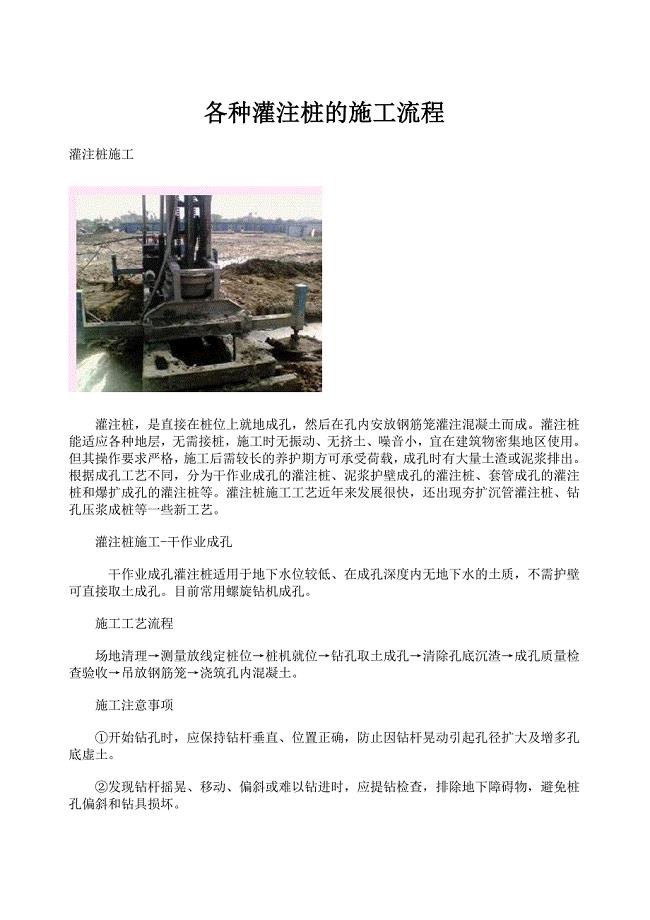
各种灌注桩及施工流程
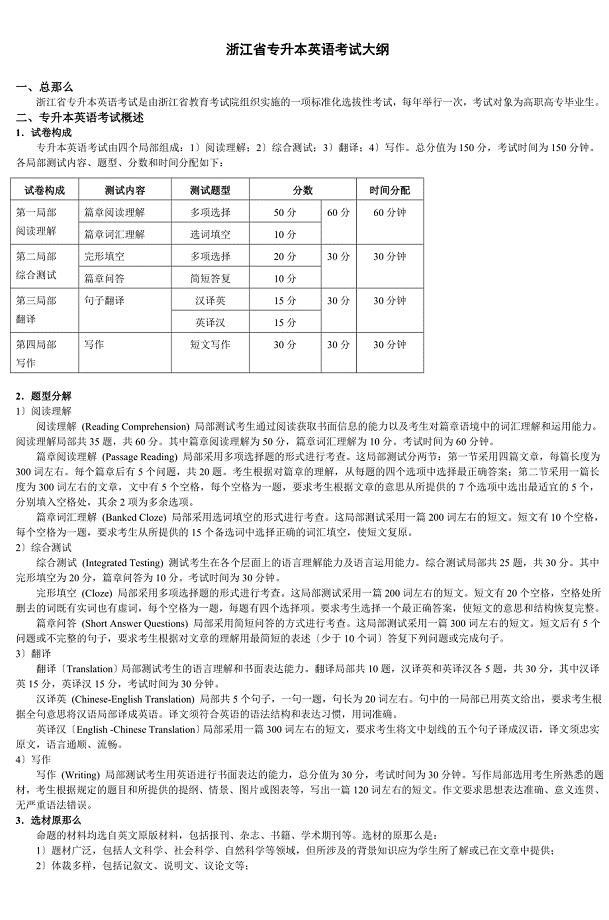
浙江省专升本英语考试大纲
公司债券担保合同
福建省泉州市2022届高三高中毕业班质量监测(一)语文试题(逐题解析)人教版高三总复习
2022实验室安全岗位责任制
工业通风试题及答案
2023全国节能宣传周活动总结标准范本(4篇).doc
关于小学五年级作文300字汇总7篇
安徽省合肥一中-高一段考物理试卷(解析版)
六年级英语下册 Module 4 Unit 1《The balloons are flying away》教案 (新版)外研版
最新2022感恩节主题教案通用版
福建省房屋登记规程
 《诗经》中的植物
《诗经》中的植物
2023-06-26 14页
办公室文员工作内容及工作职责
2023-02-08 9页
2021新版简单的租房合同范本常用(一)
2023-08-10 3页
路基工程主要施工方案
2023-07-17 17页
刚性屋面渗漏原因及防治措施
2023-01-07 9页
coc模拟辅助安装教程
2023-04-12 8页
企业和项目经理部安全事故应急救援预案
2024-02-24 16页
请假申请书(范文20篇)完整版
2023-05-29 9页
风力机空气动力学基础知识
2022-07-30 8页
生物实验室安全考试题库
2023-04-26 68页