
遥控电动小车装置的设计制作
14页
1、2012年山东省大学生电子竞赛遥控电动小车装置的设计制作(G题)2012年 9月17日摘要本遥控小车装置是采用凌阳61单片机作为主控制器,利用nRF2401无线通信模块实现实时通信,以满足使用遥控器实时控制小车的目的(通过无线遥控器的控制实现小车的前进、转向、倒退等动作)。遥控器键盘采用44键盘设计;小车电机驱动采用L298电机驱动芯片;遥控器显示屏应用LCD12864液晶显示模块。单片机输出两路PWM波控制L298N驱动小车行走。通过无线遥控控制小车行走不同轨迹,使小车找到目的地。由于要实时显示小车的具体、准确的位置,所以我们通过测量小车走过的路程,进而确定小车的坐标,并以小于0.5秒的速度刷新坐标。整个控制系统电路结构严谨,实用性强,可靠性高,稳定性好。经测试本系统的实验测试结果满足题目各项要求,实现了智能小车的设计与制作。关键词:SPCE061A单片机 L298驱动 无线遥控技术AbstractThe remote control electric car device is to use two pieces of sunplus 61 single chip microcom
2、puter as the main controller, using nRF2401 wireless communication module to realize real-time communication, in order to meet the real-time control using a remote control car purpose (complete use of wireless remote control to realize the car forward, steering, back). The remote control keyboard using 4 x 4 keyboard design; Car motor drive the L298 motor driver chip; The remote control application display LCD12864 liquid crystal display module; The car speed by single-chip microcomputer output
3、two way PWM wave to control drive L298N finished, because the application of high performance L298N chip motor drive, makes the motor speed stability; The motor to control dc motor, through the wireless remote control car walk different track route, make the car find arrive at the destination route recently. Due to display the car of the specific, accurate position, so we used photoelectric pipe measuring car passes through the journey to display the car of the actual coordinates, and meet the r
4、efresh rate is less than 0.5 seconds. The whole control system circuit structure is rigorous, practical strong, high reliability, good stability. According to the test, the system of the experiment test results meet the requirements subject and realize the intelligent car design and production. Keywords: SPCE061A L298 drive wireless remote control technology 一 系统整体方案3二 方案论证与比较41单片机的选择42电机驱动的选择53通信模块的选择54坐标定位方法的选择55按键控制的选择66显示模块的选择6三 单片机供电、电机供电供电模块6四 系统软件流程7五 理论分析与计算7六 测试方案与测试结果8七 总结9附录1:9附录2:11一
《遥控电动小车装置的设计制作》由会员枫**分享,可在线阅读,更多相关《遥控电动小车装置的设计制作》请在金锄头文库上搜索。
维修站出门证管理规定

隧道方案铁路隧道出口锚固桩施工方案
上海市租房合同资料
高考数学一轮复习检测:平面向量的数量积及平面向量的应用专题卷含答案
全国大联考高三第三次联考浙江版语文试卷

高一化学备课组教学计划样本(五篇).doc
医院医生辞职报告怎么写

2023年文员的自我介绍
我们公司的管理者代表的工作职责与内容如下
解一元一次方程 教学设计
铜镍合金换热器的制造及质量控制
学校教代会闭幕词2
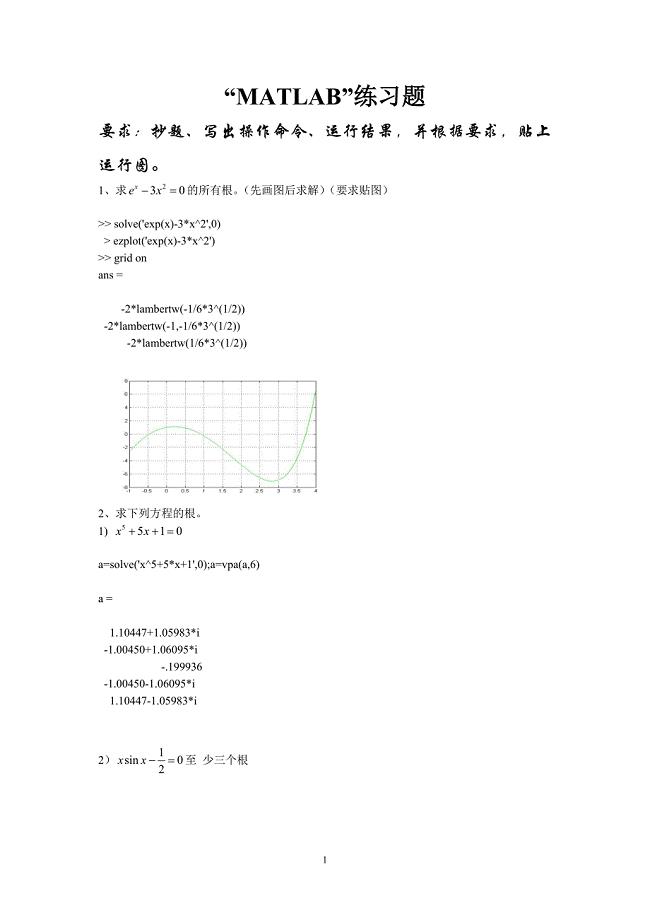
MATLAB数学实验练习题
减肥对比照片生活照
读书故事日记
精品施工方案肇庆学院外语楼安全施工方案
关于难忘的一件事的作文
幼小衔接主题家长会
南开大学21秋《社区管理》在线作业二满分答案25
特种设备安全管理制度参考(5篇)
 如何准备说课比赛
如何准备说课比赛
2022-09-16 5页
二次衬砌施工作业指导书
2022-09-20 13页
三级安全教育(班组级)
2022-10-02 36页
劳务管理资料标准化管理(最终)1
2023-06-11 7页
风冷模块修机组施工组织设计
2023-09-14 24页
液压爬升模板技术
2023-08-13 3页
《发电机氢气系统》word版
2024-02-14 22页
设备管道防腐保温施工方案
2024-01-31 24页
袖阀管注浆施工工艺工法
2023-04-08 10页
《电视台实践论》word版
2023-09-05 8页