
惯性导航系统(INS)与全球卫星定位系统(GPS)解析
11页
1、惯性导航系统(INS 与全球卫星定位系统(GPS 1摘要目前飞行器所使用的导航系统, 能适应全天候、 全球性应用的确实不多。 传统无 线电导航,如塔康(TACAN 等,在应用上存有很多的限制和不便之处。而为 改善此缺点, 一套不需要其它外来的辅助装置, 就可提供所有的导航资料, 让飞 行员参考的惯性导航系统(Inertial Navigation System ,虽已被成功发展并广为 应用, 但其在系统上的微量位置误差会随飞行时间的平方成正比累积, 因此长时 间飞行会严重影响到导航精确度, 如果没有适当的修正, 位置误差在一个小时内 会累积超过 300米。 另一套精密的导航系统 GPS , 其误差虽不会随时间改变, 但 GPS 并非万能, 有优点, 也有先天的缺陷, 它在测量高机动目标时容易脱锁并且 会受到外在环境及电磁干扰,再者 GPS 短时间的相对误差量大于 INS ,若只依 靠它来做导航或控制, 会造成相反效果。 所以在导航系统设计上, 常搭配惯性系 统来使用,正巧 GPS 与 INS 有互补的作用,可经过一套运算法则,将两者优点 保留, 去除缺点, 本文即针对两种导航系统特性进
2、行探讨, 并利用卡尔曼滤波器 法则完成简易测量数据关系推导,设计一套 “GPS/INS组合式导航系统 ” 。2前言早期舰船航行常利用 “ 领航方法 ” 来决定载体的位置及方向, 观察陆地突出物, 来 引导船身驶向某处目标。 随着飞行器的问世, 初期飞行也全凭借着飞行员对当时 自我方向、距离、高度及速度的感觉来控制驾驶,执行起飞、落地及飞机转场等 等动作。 这种控制载体由一个地方到另一个地方其间方向与距离指示的艺术, 就 称之为 “ 导航 ” (Navigation 。然而仅仅依循着人为的导航方式,在天气良好条件 下或周遭存有许多明显参考目标物时, 单纯凭目视来判断飞行并不困难; 但如果 遇上天气条件不佳、 能见度差、 参考目标不存在活不明显时, 就得依靠飞行员的 经验、 技巧及运气来进行方位及位置的判别, 这无形中会造成飞行员的压力, 更 会严重影响到飞行安全的诸多不确定因素。 因此, 人们就积极开发各种导航技术, 借着科技的快速发展与进步, 导航的艺术也变得更多样化且精确可靠。 “ 导航科 学 ” 可定义为 “ 计算并决定一个载体的位置与预先设定的目的地的方向的一种应 用 ” 。较先
3、进的无线电导航,如罗兰(Loran 、超高频全向装置(VOR 、距离测量装 置(DME 、塔康(TACAN 及多普勒(Doppler 等均相继被开发出来,成功 有效的帮助了航行者, 提供导航重要的参考依据。 然而, 无线电系统毕竟尚有很 多限制和不便之处,如使用距离、地物遮蔽等均可能会造成功能失效。另外,无 线电导航其基本架构是需要 “ 基地站 ” 发射定位无线电信号, 经飞机上的 “ 接收机 ” 天线接收、 处理及计算才能显示两点的关系, 获得导航资料; 只要其中一方失效 或无线电传输不良, 即无法进行导航工作, 这对在茫茫的空中飞行是一件非常危 险的事情。 因此到上个世纪 50年代, 美国国防部认为有必要发展一套导航系统, 不需要其它外来的辅助装置, 就可提供所有的导航数据资料, 让飞行员参考。 就 在当时, 由麻省理工学院 (MIT 开发出第一套飞机使用的惯性导航系统 (Inertial Navigation System ,此系统完全自我包容、为独立源、不受外界的环境影响即 可测量并提供所有的导航资料, 包括载体的精确位置、 对地速度、 姿态与航向等, 提供给自动导航仪及飞行仪
4、表(如地平仪及方位仪等 。由于惯性导航系统的功 能、尺寸大小、重量等特性远比其它导航系统要好,所以近年来 INS 始终能在 导航领域独占鳌头。然而惯性导航系统所提供的位置信息,仍有少量的误差,虽然其误差变化很慢, 但位置误差的累积随飞行时间的平方成正比; 因此对长时间飞行的导航精确度会 有所影响; 如果没有适当的修正, 位置误差在一小时之内会累积超过 300米, 所 以 INS 虽然是一种独立自主的工作系统,但仍有缺点,而造成误差的原因不外 与加速度计及陀螺仪的品质、 重力场变化、 起始位置、 方位输入值及安装误差等 因素有关。当然系统本身的品质,因价格的不同,仍有很大的差异。由于 INS 主要误差源为陀螺仪的角速率漂移率及加速度计的偏差, 且会因时间的累积而扩 大,因此若能采用某种设备,在一定时间内适当修正 INS 所造成的误差,一定 可以大幅度改善系统导航精确度。到 60年代,美国海军开发出一套 TRANSIT 导航卫星供舰船及潜艇定位使用, 至今,地面许多载体仍然在使用这种较不精确的导航卫星系统。 70年代美国空 军开始研究开发一种三维空间的 NA VSTAR (Navigati
《惯性导航系统(INS)与全球卫星定位系统(GPS)解析》由会员jiups****uk12分享,可在线阅读,更多相关《惯性导航系统(INS)与全球卫星定位系统(GPS)解析》请在金锄头文库上搜索。

建立安全生产长效机制-共创和谐平安输气管道
土石方爆破工程设计方案

康师傅百货商场制度汇编之退换货管理办法
庙头中学2012年中考百日誓师大会学生代表发言稿
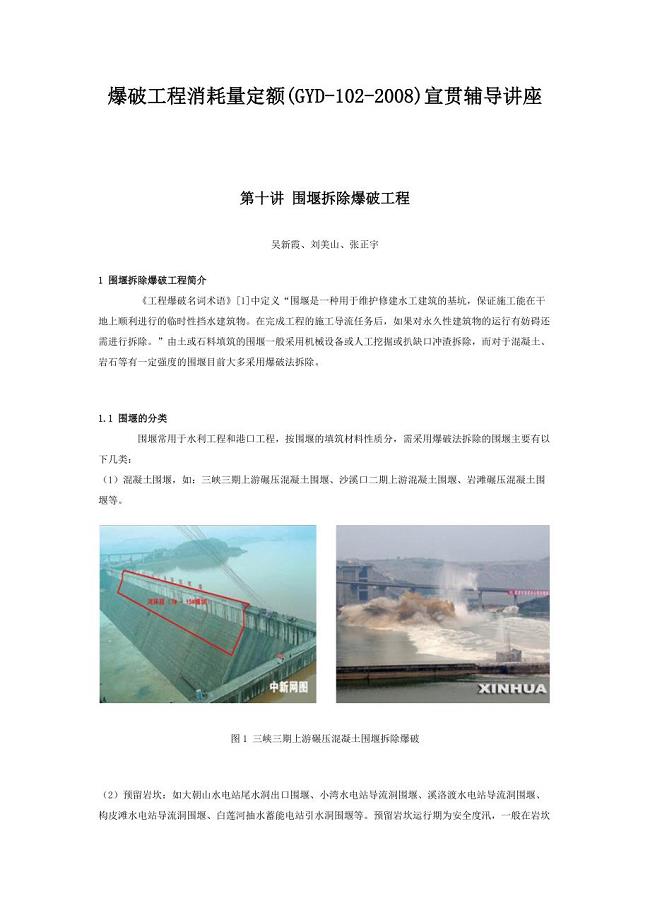
围堰拆除爆破工程
华能洱源马鞍山风电场工程土石方爆破管理制度

国资委:全面开展管理提升活动-为培育世界一流企业奠定坚实基础

《专业技术人员职业发展与规划》电子书

应收票据审计方案
建筑给水排水与采暖工程质量验收用表

广播电视管理条例行政处罚裁量标准

广东电力系统调度运行操作管理规定

建筑给排水工程名词解释

幼儿园小班安全健康活动教案:宝宝误食后的急救

建业集团房屋建筑工程交房标准内容技术交底

建筑心理学论文(1)

康师傅百货商场制度汇编之工服管理程序009

建筑工程专业一级建造师继续教育培训结业报告20

廉洁风险防控回头看工作汇报材料
平台工作人员服务规范
 2024年安徽省芜湖市中考二模语文试卷【含答案】
2024年安徽省芜湖市中考二模语文试卷【含答案】
2024-04-24 10页
2024届河北省邯郸市中考一模语文试题【含答案】
2024-04-24 10页
2024年(6月份)中考数学押题试卷【含答案】
2024-04-24 25页
2024年江苏省扬州市宝应县中考一模语文试题【含答案】
2024-04-24 10页
辽宁省本溪市2022-2023学年高中下学期学业水平考试美术试题【含答案】
2024-04-23 4页
第六单元 正比例和反比例 (单元测试卷)苏教版数学六年级下册【含答案】
2024-04-23 10页
江苏省无锡市2024年七年级下学期期中数学调研试卷【含答案】
2024-04-23 19页
江苏省江阴市华士片2022-2023学年七年级下学期期中语文试题【含答案】
2024-04-23 10页
江苏省泰州兴化市2023-2024学年高一下学期期中考试语文试题【含答案】
2024-04-23 16页
小学六年级体育与健康测试题【含答案】
2024-04-23 5页