
外文翻译--一个具有竞争力的低成本的四自由度机械人手臂的设计与开发
17页
1、 外文翻译Design and Development of a Competitive Low-Cost Robot Arm with Four Degrees of Freedom一个具有竞争力的低成本的四自由度机械人手臂的设计与开发 系 别: 机械工程学院 专业名称:机械设计制造及其自动化 学生姓名: 学 号: 指导老师: 职称: 教授 完成日期 2014年 3月摘 要这项工作的主要重点是设计,开发和实施具有竞争力的机器人手臂具有增强控制和粗短的成本。机器人手臂的设计采用四自由度和才华来完成精确简单的任务,如光材料处理,这将被整合到了作为一个助理为工业劳动力的移动平台。机器人手臂上配有数个伺服电机的臂之间做链接和执行的手臂动作。伺服电机编码器包括使没有控制器实施。控制我们使用LabVIEW ,它执行逆运动学计算和串行通信的适当的角度,以一个微控制器,驱动伺服电机,修改的位置,速度和加速度的能力的机器人。机器人手臂的测试和验证,进行和结果表明,正常工作。关键词:机器人手臂,低成本,设计,验证,四自由度,伺服电机, Arduino的的机器人控制, Labview的机器人控制目 录1引
2、言12机械设计13机械手逆运动64最终选择效应65机械手的控制75.1逆运动学控制85.2 手动96测试和验证107结果与讨论117.1伺服电机运动范围117.2 电流消耗127.3 最大负载127.4 最终位置128 结论13参考文献141引言机器人实际上是定义为研究,设计和使用机器人系统的制造1。机器人通常用于执行不安全的,危险的,高度重复的,和单调的任务。它们具有许多不同的功能,如材料处理,组装,电弧焊接,电阻焊接,机床的装载和卸载功能,刷涂,喷涂等。主要有两种不同类型的机器人:一个服务机器人以及工业机器人。服务机器人是机器人,工作半或完全自主地去履行服务,有用的福祉人类和设备,但不包括生产操作2 。工业用机器人,在另一方面,被正式通过ISO定义的自动控制和多用途可编程操纵器在三个或更多个轴3。工业机器人是移动的材料,零件,工具,或通过可变的程式动作的专门设备来执行各种任务。工业机器人系统不仅包括工业机器人,但也能够执行其任务以及测序或监视通信接口需要对机器人的任何设备和/或传感器。2007年全球市场增长了3,约114,000新安装的工业机器人。截至2007年底,全国共有大约一万
3、个工业机器人的使用,估计有50,000服务机器人用于工业用途比较3 。由于增加使用工业机器人手臂,演变到该主题开始试图模仿人类动作的细节模式。例如一组学生在韩国做创新的设计,为舞蹈的手,举重,中国书法和颜色分类机械臂考虑4 。另一组工程师在美国开发八个自由度机械臂。该机器人是能够把握多个对象与很多从笔形状的一球,也模拟人类的手5。在空间上,航天飞机遥控器系统,被称为SSRMS或Canadarm ,其继任者是例子多度已经用来执行各种使用专门部署热潮的任务,例如航天飞机的检查自由机械臂有摄像头和连接在末端执行器和卫星的部署和检索演习从货舱航天飞机传感器6 。在墨西哥,科学家们已经上了轨道设计和发展许多机器人的手臂,墨西哥政府估计,在墨西哥有在不同的工业应用中使用了大约11,000机械臂。不过,专家认为,机器人手臂的最高点,不仅质量更高,而且准确,可重复性和粗短的成本。 大多数机器人都设置了一个操作的示教和重复技术。在这种模式下,一个训练有素的操作者(编程器)通常使用的便携式控制装置(示教)手动教机器人的任务。在这些编程会话机器人的速度很慢。 目前的工作是一个两阶段的项目,这需要一个移动机器
4、人能够运送工具从存储室到工业单元的一部分。在这个阶段中的项目,该项目开展了在科技,墨西哥蒙特雷大学,主要的重点是设计, 制定和实施了工业机器人手臂粗短的成本,准确和优越的控制。这个机器人手臂的设计采用四自由度和才华来完成简单的任务,如光队友里亚尔处理,这将被整合到移动平台的形式,作为一个助理为工业劳动力。2机械设计 机器人手臂的机械设计是基于一个机器人操作器具有类似功能的一个人的手臂6-8。这样的操纵器的链接是由关节,允许旋转运动和操纵器的链接被认为形成一个运动链连接。机械手的运动链的业务最终被称为末端效应器或臂端的 - 工具,它是类似于人的手。图1显示了自由体图的机器人手臂的机械设计。图1 机械手的自由体图 如图所示,端部执行器不包括在设计,因为市售的夹持器被使用。这是因为端部执行器是系统中最复杂的部分之一,并且,反过来,这是很容易和经济地使用商业化生产它。 图2示出了机器人手臂的工作区域。图2 机械手工作区域图这是一个机器人臂具有四个自由度(DOF 4)的典型的工作空间。机械设计仅限于4自由度,主要是因为,这样的设计允许大部分必要的运动,并保持 成本和机器人竞争的复杂性。因此,关节
《外文翻译--一个具有竞争力的低成本的四自由度机械人手臂的设计与开发》由会员大米分享,可在线阅读,更多相关《外文翻译--一个具有竞争力的低成本的四自由度机械人手臂的设计与开发》请在金锄头文库上搜索。

节约粮食调查报告.docx
中考英语模拟英语试题有答案
2023届上海外国语大附属外国语学校物理八年级上册期末质量跟踪监视模拟试题含解析.doc
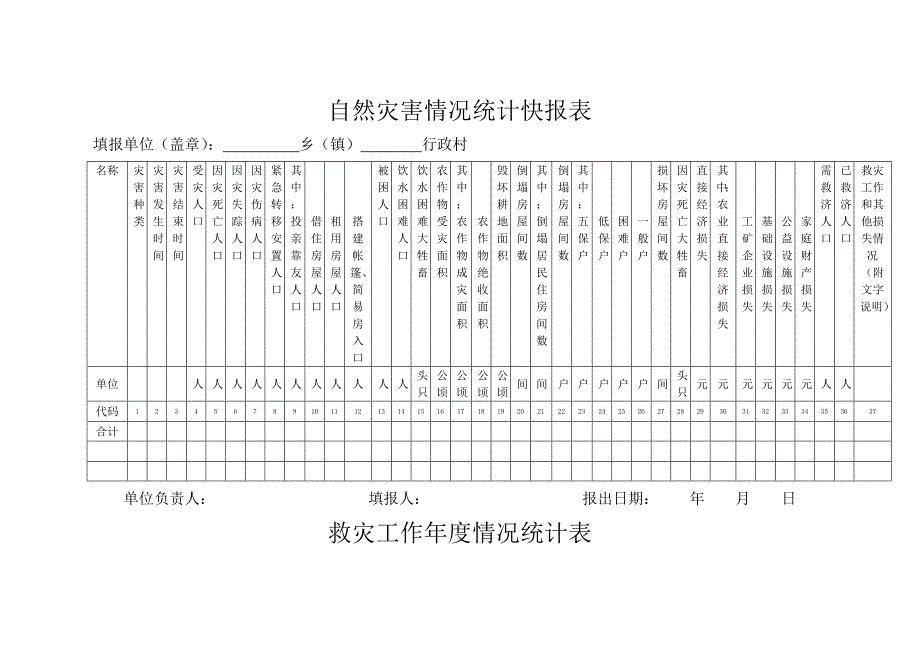
自然灾害快报表.doc

初三学生下学期学习计划范本(二篇).doc
工程量清单和招标控制价的编制服务方案.doc
Verilog复习题.doc
2023年装修合同2052范文.docx
2019年中班班主任工作计划精选(二篇).docx
2023初一语文教师工作计划模板(3篇).doc

初中实施素质教育总结.doc

消防系统工程施工方案
从线性思维到非线性思维 (2).doc
大学积极心理学论文范文.docx
WHVK-QP-06-05市场调研程序

MBA数学历年真题(共52页)

1 液体散热技术.docx
班级小岗位管理制度.doc

债务转让协议.doc
营销团队建设与管理心得体会张浩.docx
 不可撤销支付居间服务费承诺书
不可撤销支付居间服务费承诺书
2023-12-02 4页
生产与运作管理形成性考核册答案
2023-07-08 16页
食品配送临时补货变更供货配送的应急预案
2022-10-11 8页
2018年尔雅课堂《戏曲鉴赏》吴乾浩-期末考试答案解析.doc
2023-09-06 10页
推行“四位一体”社区治理模式建设和谐文明新社区
2022-11-20 6页
违规接受宴请检讨书
2023-07-20 5页
GB30871-2014八大特殊作业票证
2024-02-25 19页
2017医保定点零售药店管理制度.docx
2023-11-13 26页
工程管理类大学生职业生涯规划书
2022-11-14 17页
32关于地方政府融资平台贷款争论与管理思考[3]
2022-12-19 18页