
相扑机器人实验指导书
15页
1、实验一 相扑机器人的认知一实验目的1. 了解相扑机器人的基本构成及原理2. 熟悉和掌握机器人软件之一PBASIC语言下的BASIC STAMP编译软件二实验要求通过组装机器人使学生能了解机器人学基本原理、运动基础以及相关扩展功能,并熟悉和掌握BASIC STAMP编译软件的原理和方法三实验设备 相扑机器人教学套件箱(内含小尖嘴钳、小号螺丝刀)四实验内容1组装相扑机器人1) 安装电池盒所需配件: l 电池盒l 2颗4/40 3/8”平头螺钉l 2颗4/40螺母l SumoBot底盘2) 安装伺服电机所需配件:l Parallax连续旋转伺服电机l 8颗4/40 3/8”盘头螺钉l 8颗4/40螺母l SumoBot底盘3) 安装SumoBot PCB后面支柱所需配件:l 2根5/8”支柱l 2颗4/40 3/8”盘头螺钉l SumoBot底盘4) 安装SumoBot PCB前面支柱所需配件:l 2根5/8”支柱l 2颗4/40 1”盘头螺钉l SumoBot底盘5) 装配PCB面板所需配件:l SumoBot PCBl 2颗4/40 3/8”盘头螺钉l 2颗1-1/4”支柱l 2个垫片l
2、 SumoBot底盘6) 安装车轮所需配件:l 安装好的车轮l 黑色小螺钉(随伺服电机)l SumoBot底盘7) 安装铲子所需配件:l SumoBot铲子l 2颗4/40 1/4”盘头螺钉l 2颗4/40螺母l SumoBot底盘8) 安装QTI传感器电线所需配件:l 2根10” 3-pin延长线l SumoBot底盘9) 安装QTI传感器所需配件:l 2个QTI传感器l 2颗4/40 1/4”盘头螺钉l SumoBot底盘10) 连线X7=左边伺服电机X6=右边伺服电机X5=左边QTI传感器X4=右边QTI传感器 将电池盒线连接至X1,其中白线连接到+端。教学底板上有一个三位开关,见下图。“0”位:关断教学底板电源“1”位:教学底板上电“2”位:教学底板和伺服电机一同上电2学习使用BASIC STAMP软件1)通讯测试为了确认BASIC Stamp模块与你的计算机通讯正常,点击“Run”菜单项,选择“Identify”。 这时,会出现一个下图所示的窗口,样例显示系统在COM2端口检测到BASIC Stamp 2 。 这就意味着你的计算机与BASIC Stamp模块通讯是正常的。2)
3、 编写Hello程序 $STAMP BS2 $PBASIC 2.5 DEBUG Hello, this is a message from your sumobot. END第一条指令是“Stamp”指令,它告诉BASIC Stamp编辑器你将下载程序到BASIC Stamp 第二条指令是“PBASIC”指令,它告诉BASIC Stamp编辑器你使用的是2.5版本的PBASIC编程语言。这两条消息语句叫做编译器指令,以后所有的程序都要用到这两句指令。 END 在程序运行结束之后,这个命令把BASIC Stamp模块置于低功耗模式,所以这个命令比较简便。在低功耗模式下,BASIC Stamp模块等待复位键按下(或释放)或有新的程序通过编辑器下载。如果板上的复位键被按下,BASIC Stamp模块将再运行一次已加载的程序;如果新程序被加载进来,旧程序会被擦除,并且开始运行新程序。 “DEBUG”就是让BASIC Stamp发送到调试终端的信息以某种特定方式显示的指令。“DEC”就是一个格式词,告诉调试终端显示十进制数值。“CR”是一个向调试终端发送回车命令的控制符。控制符“CR”之后的文本
4、或数值会显示在原有文本的下一行。你可以修改你的程序使它包含更多的格式词或控制符的调试命令。五思考题1机器人的定义和基本组成是什么?2什么是嵌入式系统?实验二 相扑机器人伺服电机的控制一实验目的1. 了解Parallax微型伺服电机的基本构成及原理2. 学会搭建LED测试电路,掌握扬声器的使用3. 完成伺服电机的调零,学会调整、测试电机二实验要求通过连接、调整和测试相扑机器人的伺服电机,以及LED测试电路的搭建使学生能够基本掌握对伺服电机的控制。三实验内容1. 伺服电机简介本次实验所用的机器人采用的是Parallax公司的连续旋转伺服电机伺服电机主要有三根线,分别为:黑、红、白,其中红色的为电源线(最大为6V直流电压);黑色为地线;白色的为控制信号线(一般输入周期为23ms左右的脉冲序列),通过对这信号线输入脉冲序列来控制电机的运动,可以控制电机的运动速度,运动方向)。所有电机使用前必须进行零位校正。控制伺服电机速度和方向涉及如何让BASIC Stamp微控制器不断发送相同命令给电机。该命令通常以每秒50次的频率重复发送到伺服电机以维持其速度和方向PAUSE命令: 让BASIC Stam
《相扑机器人实验指导书》由会员m****分享,可在线阅读,更多相关《相扑机器人实验指导书》请在金锄头文库上搜索。

简短励志故事八年级.docx
新修订会计准则准则变化
【教育资料】苏教国标版四年级语文下册教案-宋庆龄故居的樟树.doc
教师个人计划总结教师下学期工作计划

2023年06月广东深圳市光明区科技创新局选聘一般特聘岗位专干笔试题库含答案详解析

2023年浅谈如何提高小学中年级学生课外阅读能力.doc
![公路工程上墙管理制度资料[1].doc](https://union.152files.goldhoe.com/2023-8/10/3dbff4d6-5aa2-414f-9f04-7fc8624d6aca/pic1.jpg)
公路工程上墙管理制度资料[1].doc
毛毛虫行走团体趣味游戏.doc
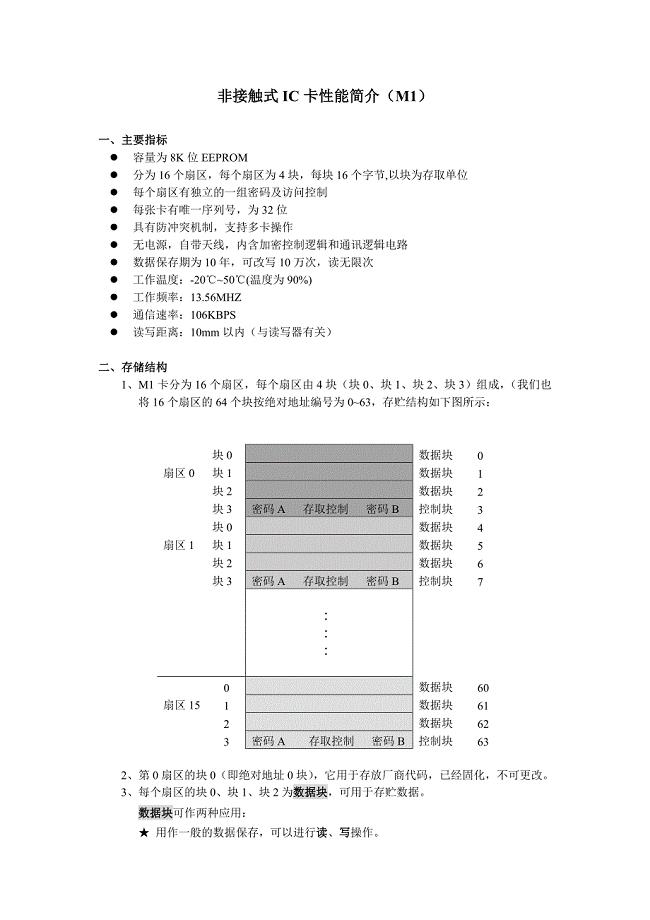
M1卡的技术文档资料.doc

Win7、XP下快速切换有线和无线网络的方法.docx
利用粉煤灰及钢渣等生产新型建材产业基地项目谋划建议书.doc

2022年营运发展管理中心设施设备维保方案
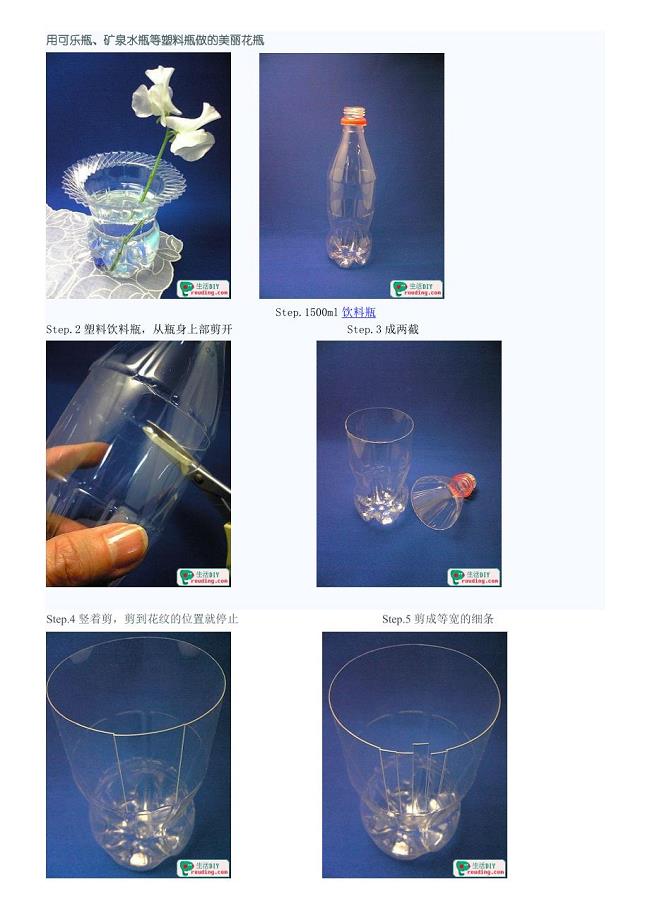
饮料瓶废物利用2.doc

医疗机构法定代表人主要负责人变更
2023年施工合同范文集锦9篇.docx

2023年简短毕业生转正总结报告(三篇).doc
商业银行内部审计指引2016.docx
幼儿园中班语言《啾比的巧克力和他的朋友》教学反思
饮料市场营销策划书.doc

妇幼保健院项目可研计划书.doc
 成套软化水设备树脂再生过程及调试使用方法.doc
成套软化水设备树脂再生过程及调试使用方法.doc
2023-10-15 3页
如何合理的摄入营养.doc
2023-01-20 10页
自动封胶机保养与维护指导书.doc
2023-03-06 22页
精益管理思想.doc
2022-08-19 3页
印染废水处理工艺流程.doc
2022-11-30 3页
儿童注意力缺陷行为.doc
2023-09-17 7页
第十六章 神经系统疾病病人的护理讲义.doc
2024-01-29 33页
外用冻干人纤维蛋白粘合剂说明书.doc
2024-03-06 4页
法律法规试题1.doc
2023-01-15 10页
翼卡通产品介绍.doc
2023-07-20 4页