
DMC算法MATLAB编程及仿真
17页
1、一、前言工业生产的过程是复杂的,建立起来的模型也是不完善的。即使是理论非常 复杂的现代控制理论,其效果也往往不尽人意,甚至在一些方面还不及传统的PID控制。20世纪70年代,人们除了加强对生产过程的建模、系统辨识、自适 应控制等方面的研究外,开始打破传统的控制思想,试图面向工业开发出一种对 各种模型要求低、在线计算方便、控制综合效果好的新型算法。在这样的背景下, 预测控制的一种,也就是动态矩阵控制(DMC)首先在法国的工业控制中得到 应用。因此预测控制不是某种统一理论的产物,而是在工业实践中逐渐发展起来 的。预测控制中比较常见的三种算法是模型算法控制(MAC),动态矩阵控制(DMC )以及广义预测控制。本篇所采用的是动态矩阵控制,其采用增量算法, 因此在消除稳态余差方面非常有效。二、控制系统设计方案2.1 控制系统方案设计图图(1) 预测控制原理结构图上图就是预测控制原理结构图,从图中我们可以看到,预测控制的主要特点 即建立预测模型;采用滚动优化策略,采用模型误差反馈矫正。这也是预测控制 的本质所在。下面将对这三个特点一一说明。2.2 预测控制基本原理1、预测模型:预测模型的功能是根据
2、对象历史信息和未来输入对对象输出 进行预测,它是被控对象的准确模型。这里只强调模型的功能而不强调其结构形 式。因此,预测模型可以是状态方程、传递函数等传统的参数模型,对于线性稳 定对象,阶跃响应、脉冲响应这类非参数模型也可以作为预测模型使用。预测模 型具有展示系统未来动态行为的功能,这样,就可以利用预测模型来预测未来时 刻被控对象的输出变化及被控变量与其给定值的偏差,作为控制作用的依据,使 之适应动态系统所具有的因果性的特点,得到比常规控制更好的控制效果。2、滚动优化:预测控制是一种优化控制算法,它是通过某一性能指标的最 优来确定未来的控制作用。这一性能指标涉及到系统未来的行为。如,通常可取 被控对象输出在未来的采样点上跟踪某一期望轨迹的方差最小,性能指标中涉及 到的系统未来的行为,是根据预测模型由未来的控制策略决定的。但是,预测控 制中的优化与传统意义下的离散最优控制有很大的区别,这主要表现在预测控制 中的优化是一种有限时段的滚动优化。每一采样时刻,优化性能指标只涉及到从 该时刻起未来的有限时段,到下一采样时刻,这一优化时段同时向前推移。因此, 预测控制不是用一个对全局相同的优化性能
3、指标,而是在每一采样时刻有一个相 对于该时刻的优化性能标。不同时刻优化性能指标的相对形式是相同的,但其绝 对形式,即,所包含的时间区域是不同的。在预测控制中,优化不是一次离线进 行,而是反复在线进行,这就是滚动优化的含义。虽然各个不同时刻的优化指标 的相对形式是相同的,每一步实现的是静态参数的优化,但因为其包含的时间区 域不同,从控制的全过程看,实现的是动态的优化。因而预测控制被称为是“滚 动优化”的算法。与一般最优控制中的全局优化相比,预测控制中的滚动优化只 能得到全局的次优解,但由于它的优化始终建立在实际过程的基础上,使控制结 果达到实际意义上的最优控制,能够有效地克服工业过程控制中的模型不精确、 非线性、时变等不确定性的影响。3、反馈校正:预测控制是一种闭环控制算法,预测算法在进行滚动优化时, 优化的基点应与系统实际一致。但作为基础的预测模型,只是对象动态特性的粗 描述,由于实际系统中存在的非线性、模型失配、干扰等因素,基于不变模型的 预测不可能和实际情况完全相符,这就需要用附加的预测手段补充模型预测的不 足,或者对基础模型进行在线修正。滚动优化只有建立在反馈校正的基础上,才 能
4、体现出其优越性。因此,预测控制算法在通过优化确定了一系列未来的控制作 用后,为了防止模型失配或环境干扰引起控制对理想状态的偏离,并不是把这些 控制作用逐一全部实施,而只是实现本时刻的控制作用。到下一采样时刻,则首 先检测对象的实际输出,并利用这一实时信息、对基于模型的预测进行修正,然 后再进行新的优化。反馈校正的形式是多样的,可以在保持预测模型不变的基础 上,对未来的误差作出预测并加以补偿,也可以根据在线辨识的原理直接修改预 测模型。不论取何种校正形式,预测控制都把优化建立在系统实际的基础上,并 力图在优化时对系统未来的动态行为作出较准确的预测。因此,预测控制中的优化不仅基于模型,而且利用了反馈信息,因而构成了闭环优化。2.3 DMC 控制策略DMC算法的基本原理DMC (Dynamic Matrix Control)算法是基于被控对象 单位阶跃响应非参数模型的预测控制算法。通过反馈校正和滚动优化当前和未来 时刻的控制量,使得输出响应符合预先设定的轨迹。DMC动态矩阵控制是一种 用被控对象的阶跃响应特性来描述系统动态模型的预测控制算法。三、模型建立3.1 模型和辨识算法的选择已知加热炉
《DMC算法MATLAB编程及仿真》由会员鲁**分享,可在线阅读,更多相关《DMC算法MATLAB编程及仿真》请在金锄头文库上搜索。
2023年县教育局党委全面从严治党主体责任工作开展情况汇报.docx
土地利用现状数据库Word版
部门经理年度述职报告范文3篇.doc

最精彩的大学生英语演讲范文20篇.doc

住院治疗医疗纠纷和解协议书律师版(七篇)
人力资源部下半年计划2
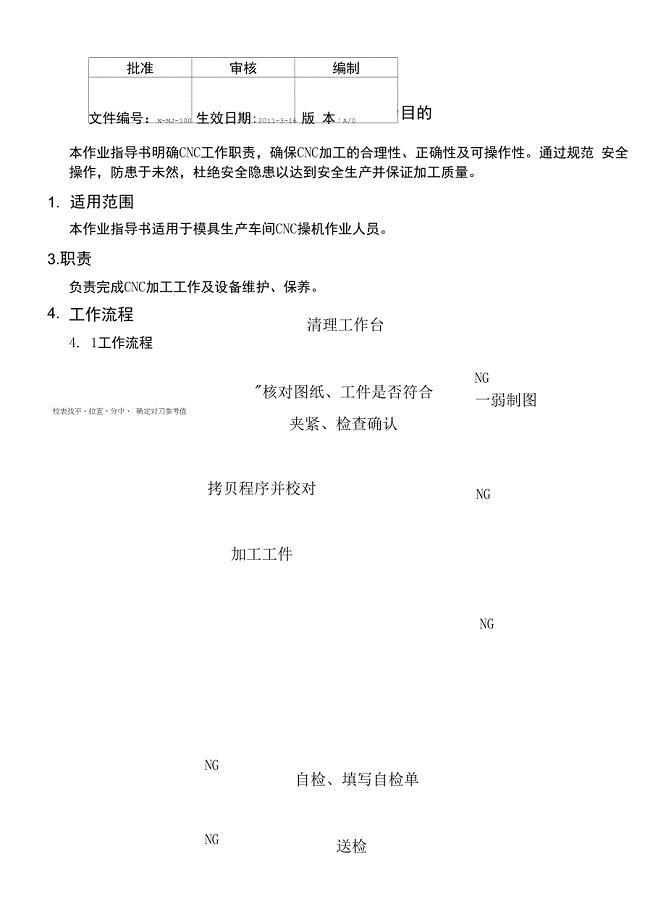
加工中心作业指导书.docx

有文采的班主任工作总结范本(二篇).doc
2023年市广播电视局创新工作机制提高引导水平.docx

日语接续词详解3.doc
益盟操盘手指标
工程项目经理个人工作总结范文
2022年职称计算机考试:Powerpoint知识讲义(第七章).docx
2023年公司业务员工作总结.docx
安全管理之安全理念与做法
服务明星评选表格.doc

OR7-基于近红外光谱法的汽车驾驶员脑氧参数振动响应分析.docx
报关员考试英语辅导.doc
电子元器件的选择与应用--毕业设计论文.doc
计算机硬件管理制度.doc
 花海灌溉管理所阳光水务凸显阳光效应
花海灌溉管理所阳光水务凸显阳光效应
2022-11-08 5页
公共基础知识 海洋基本知识
2023-06-27 1页
我国产业集群发展取得重要进展
2023-05-27 7页
建设更具吸引力的公共交通系统共5页word资料
2023-07-31 6页
房屋维修补偿协议书
2023-05-10 3页
日语物流用语专用词汇
2022-11-07 6页
管理沟通调研报告
2023-03-12 10页
2022年上学期九年级学生班主任评语
2023-11-27 14页
广告策划方案及服务费用预算.doc
2022-09-06 25页
2017年会计工作总结范文工作总结范文
2023-12-10 4页