
喷漆机械手设计
53页
1、1摘要喷漆机械手设计 专业:机械电子工程 学号:20100310060314 学生姓名:贺永翔 指导老师:罗智中摘要工业机械手是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上建有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。本文设计的为工业常见的五自由度机械手,灵巧空间为以底座为基准的半球形区域。机械结构部分使用Pro/Engineer三维软件进行设计,以期获得部分零件的质心与转动惯量参数,然后根据获得的参数选择步进电机型号。电路控制部分采用51系列单片机作为控制中枢,L298芯片作为电机驱动器。软件部分使用C语言编程,采用PWM技术进行脉宽调速。因为步进电机的特性,本文所设计的喷漆机械手采用的控制系统为开环控制系统。关键词:喷漆机械手 自动喷漆 机器人 工业机器人1ABSTRACTSpraying manipulator designABSTRACTThe spraying operation is a harmful dangerous jobs which
2、is the most suitable for manipulator. In order to improve the appearance quality and work efficiency of our products,and ensure the quality of coating and appearance effect, it is necessary to develop automatic spraying equipment suitable for Chinas national conditions。But spraying equipment has special requirements for its control system,so we must first develop low cost automatic spraying manipulator control system.The painting manipulator is designed to meet the painting process at the same t
3、ime, as far as possible to reduce the difficulty of operation, so that each painter can use manipulator after simple teaching.There are five degrees of freedom in the manipulator, all of which are rotational joints. Among them, three joint make manipulator going any position, the nozzle can reached the semi circular of smart space, the other two joint make nozzle turning around, nozzle can extend different spraying parts of the surface, in order to meet the spraying process.Key words:Spraying ma
4、nipulator operation difficulty painting process2目录目录摘要1ABSTRACT2第一章 绪论11.1喷漆机械手简介11.2研究意义11.3 研究现状11.4主要工作及流程3第二章 机械结构设计42.1 方案功能设计与分析42.2 关节部分设计62.2.1 位置自由度关节设计62.2.2 姿态自由度关节设计62.3 机械手三维模拟图7第三章 动力学分析-103.1 Pro/Engineer简介103.2 步进电机选型103.2.1 腕部及末端部分选型103.2.2 小臂部分电机选型113.2.3 大臂部分电机选型123.3 运动学方程分析12第四章 控制电路164.1 控制硬件设计164.1.1 89C51芯片简介164.1.2 L298步进电机驱动器简介174.1.3 电路设计思路174.1.4 电路原理图184.2 控制软件设计184.2.1 第一种方案184.2.2 第二种方案18第五章 设计小结24参考文献25附录A 外文翻译原文26附录B 外文翻译译文341贺永翔:喷漆机械手设计第一章 绪论1.1喷漆机械手简介机械手是在机械化、自
《喷漆机械手设计》由会员大米分享,可在线阅读,更多相关《喷漆机械手设计》请在金锄头文库上搜索。
1、水滴里的生物.docx
甘蔗生理生化测定指标全文.doc
学生宿舍管理员岗位职责及考核办法(新)(1).doc
仰拱砼弧形模板分层浇筑技术交底.docx

天津一汽充电桩施工方案
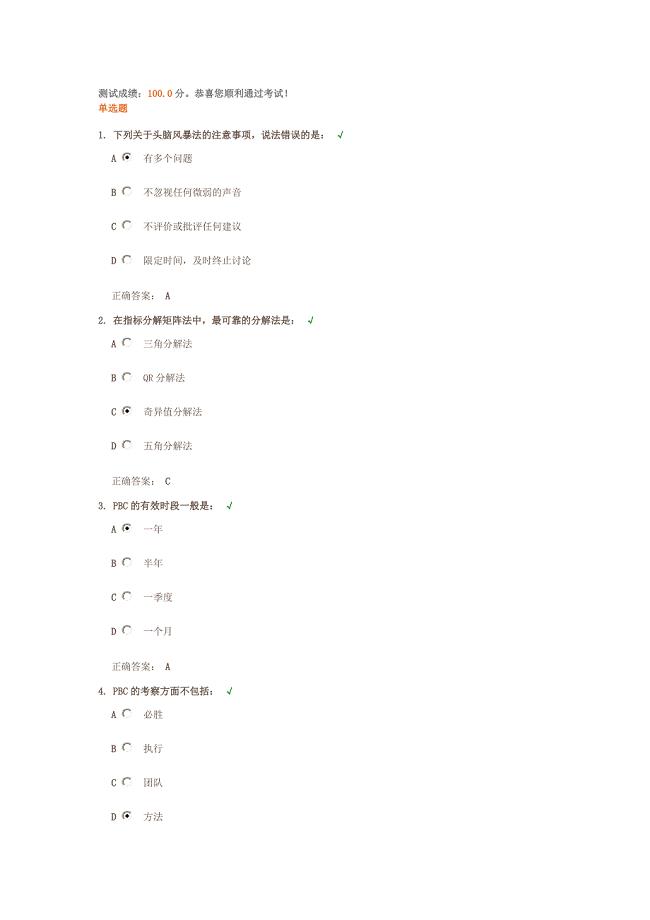
获得各级KPI的方法 课后测试 (2).doc
2023年机关管理局政务公开 汇报.doc
山东省某钢管公司年产3.5万吨轴承无缝钢管项目可行性计划书.doc
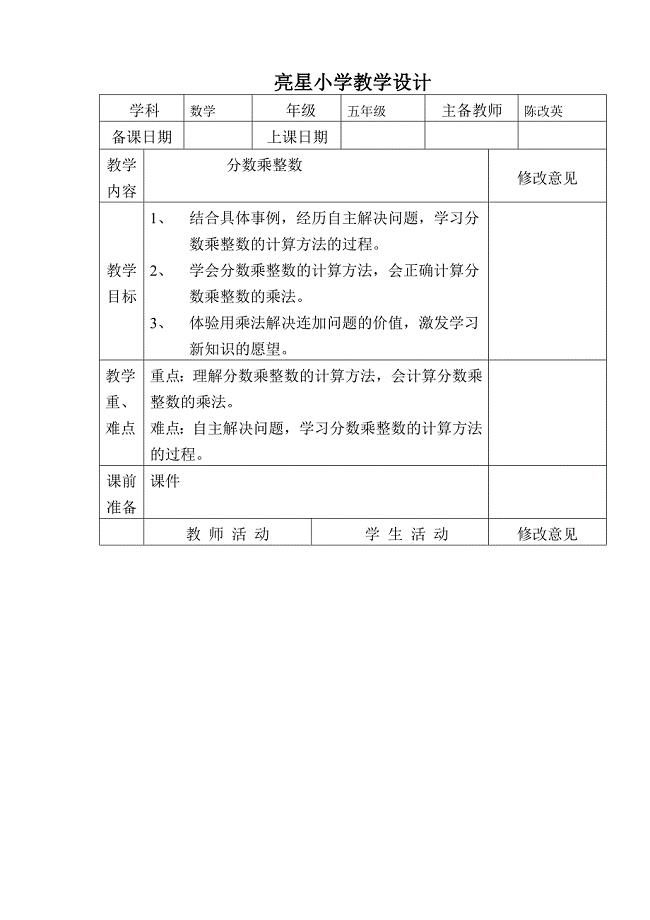
亮星小学教学设计.docx
储蓄存款和商业银行教学设计.doc

职场中如何在自己的工作交际圈保持好的心态和方法?.doc
81221简单的旋转作图

2021年四年级语文下册期中检测卷及答案.doc
集体生日派对主持词模板.docx

五星级酒店前台专用英语.doc

八年级第三周体育与健康教学设1.doc

2023年教师节活动主持词精选范文五篇.docx
审计质量控制探讨.doc

2023年第五届妇代会工作总结(范文).doc

云南开智艺术培训学校昆明西山区合作协议.docx
 游戏学习班小结
游戏学习班小结
2022-09-17 6页
人教版:小学三年级上册数学第五、六单元知识点及练习题
2023-04-14 6页
小学庆“六一”活动主持稿
2023-09-08 3页
《适情雅趣·引》赏析探秘
2023-01-19 5页
GSP认证实操问题解答(一)
2023-10-25 4页
初中英语质量分析报告
2022-09-30 6页
学生安全责任承诺书
2024-02-18 3页
人教版四年级数学上册试卷三位数除以两位数
2022-08-17 9页
小学生四年级下册优秀作文9篇
2022-12-02 8页
富士木业2011年度经营规划
2024-02-19 3页