
2012年数学建模D题
29页
1、2012高教社杯全国大学生数学建模竞赛承 诺 书我们仔细阅读了中国大学生数学建模竞赛的竞赛规则.我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。我们知道,抄袭别人的成果是违反竞赛规则的, 如果引用别人的成果或其他公开的资料(包括网上查到的资料),必须按照规定的参考文献的表述方式在正文引用处和参考文献中明确列出。我们郑重承诺,严格遵守竞赛规则,以保证竞赛的公正、公平性。如有违反竞赛规则的行为,我们将受到严肃处理。我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。我们参赛选择的题号是(从A/B/C/D中选择一项填写):D我们的参赛报名号为(如果赛区设置报名号的话):所属学校(请填写完整的全名):* 参赛队员(打印并签名) :1. 2 3 指导教师或指导教师组负责人 (打印并签名): 日期:2012年9月9日 赛区评阅编号(由赛区组委会评阅前进行编号):请预览后下载!2012高教社杯全国大学生数学建模竞赛题目编
2、 号 专 用 页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录:评卷人评分备注 全国统一编号(由赛区组委会送交全国前编号):请预览后下载!机器人避障问题摘要二十一世纪科技发展迅速,机器人作业逐渐兴盛。本文研究了机器人避障最短路径和最短时间的问题。主要研究了在一个区域中存在12个障碍物,由出发点到达目标点以及由出发点经过途中的若干目标点到达最终目标点的两种情形。我们通过证明具有圆形限定区域的最短路径是由两部分组成的:一部分是平面上的自然最短路径(即直线段),另一部分是限定区域的部分边界,这两部分是相切的,互相连接的。依据这个结果,我们可以认为最短路径一定是由线和圆弧做组成,因此我们建立了线圆结构,这样无论路径多么复杂,我们都可以将路径划分为若干个这种线圆结构来求解。一、问题重述图1是一个800800的平面场景图,在原点O(0, 0)点处有一个机器人,它只能在该平面场景范围内活动。图中有12个不同形状的区域是机器人不能与之发生碰撞的障碍物,障碍物的数学描述如下表:编号障碍物名称左下顶点坐标其它特性描述1正方形(300, 400)边长2002圆形圆心坐标(550, 450),半径7
3、03平行四边形(360, 240)底边长140,左上顶点坐标(400, 330)4三角形(280, 100)上顶点坐标(345, 210),右下顶点坐标(410, 100)5正方形(80, 60)边长1506三角形(60, 300)上顶点坐标(150, 435),右下顶点坐标(235, 300)7长方形(0, 470)长220,宽608平行四边形(150, 600)底边长90,左上顶点坐标(180, 680)9长方形(370, 680)长60,宽12010正方形(540, 600)边长13011正方形(640, 520)边长8012长方形(500, 140)长300,宽60在图1的平面场景中,障碍物外指定一点为机器人要到达的目标点(要求目标点与障碍物的距离至少超过10个单位)。规定机器人的行走路径由直线段和圆弧组成,其中圆弧是机器人转弯路径。机器人不能折线转弯,转弯路径由与直线路径相切的一段圆弧组成,也可以由两个或多个相切的圆弧路径组成,但每个圆弧的半径最小为10个单位。为了不与障碍物发生碰撞,同时要求机器人行走线路与障碍物间的最近距离为10个单位,否则将发生碰撞,若碰撞发生,则机器人
4、无法完成行走。机器人直线行走的最大速度为个单位/秒。机器人转弯时,最大转弯速度为,其中是转弯半径。如果超过该速度,机器人将发生侧翻,无法完成行走。请建立机器人从区域中一点到达另一点的避障最短路径和最短时间路径的数学模型。对场景图中4个点O(0, 0),A(300, 300),B(100, 700),C(700, 640),具体计算:(1) 机器人从O(0, 0)出发,OA、OB、OC和OABCO的最短路径。请预览后下载!(2) 机器人从O (0, 0)出发,到达A的最短时间路径。注:要给出路径中每段直线段或圆弧的起点和终点坐标、圆弧的圆心坐标以及机器人行走的总距离和总时间。图1 800800平面场景图二、问题分析本题可以用AutoCAD作图软件完成部分路线及线段、弧线、坐标的标注等。问题一O点到A点理论上是直线最短,但不能折点转弯(必须切线转弯)、必须与障碍物保持10单位的距离,转弯弧线半径最短为10个单位,则可以以障碍物5的左上角和右下角点位圆心画半径为10单位的圆,并在障碍物4的左下角画同样的圆,那么我们可以用拉绳子的方法模拟机器人行走路线,求出到达目标点的最短距离。 O到B与O到
《2012年数学建模D题》由会员cl****1分享,可在线阅读,更多相关《2012年数学建模D题》请在金锄头文库上搜索。
关于机械厂大学生实习报告.docx
2023年元旦节的经典日记1.docx

家庭装修知识大全.doc

弟子规带拼音解释版
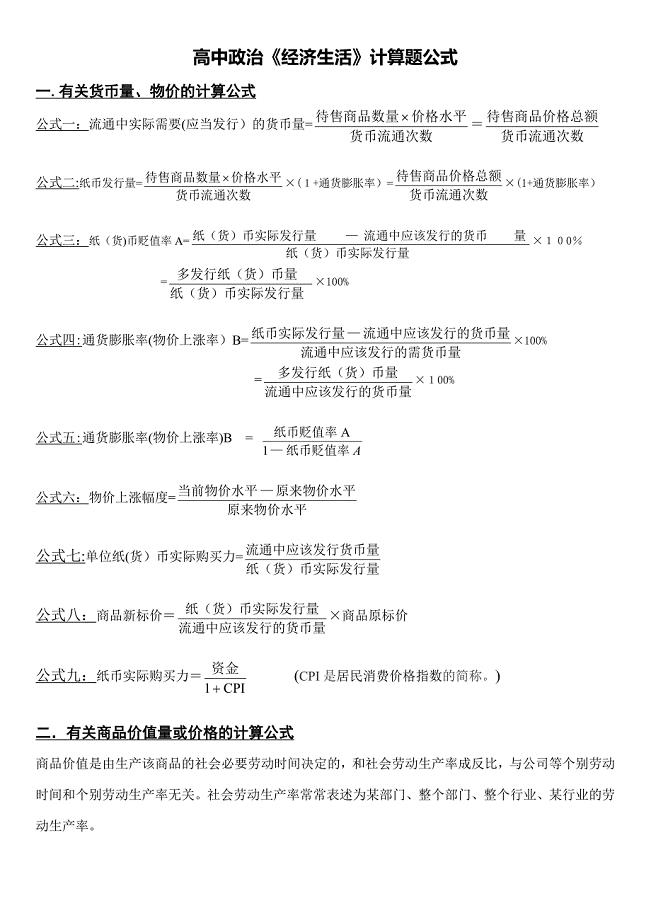
高中政治必修一《经济生活》计算题公式大全
工程项目合同书范文(六篇)
团日活动方案.doc
关于中学实习报告四篇
板栗栽培管理技术要点.doc
10.献出我们的爱心1.docx
基础砼浇筑施工工艺.doc
2015会计继续教育试题及答案三
人教版五年级英语上册教案Unit-1-单元教案-6.doc
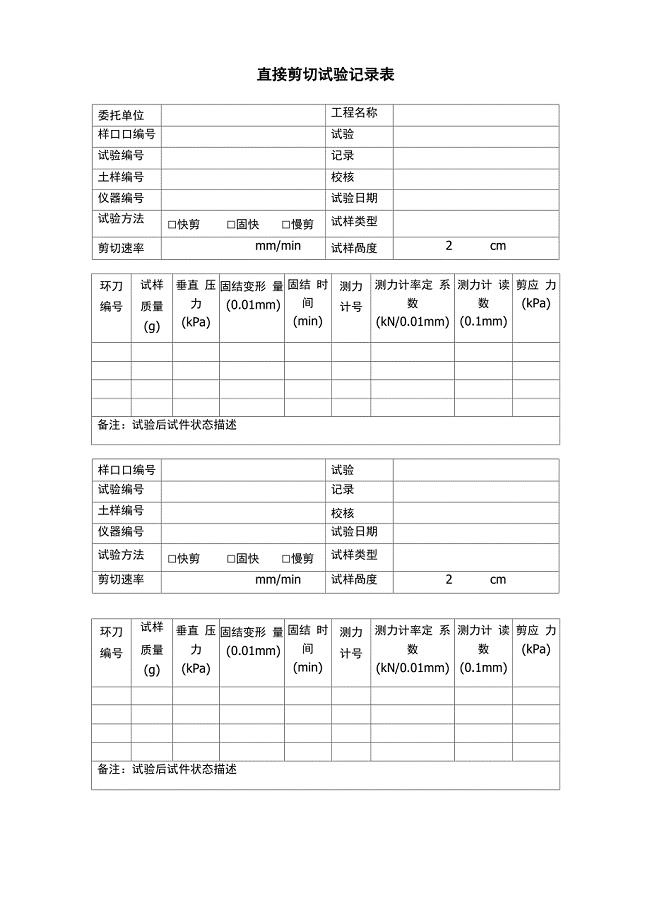
土的直接剪切试验记录表
创新法式经典洋房 再现纯正欧洲风情.doc

2019年一年级下学期过关强化训练数学期末试卷.docx
部编版五年级语文下册期中试卷推荐(6套).docx
2023年世界环境日宣传标语12篇宣传世界环境日的标语
2018年安全生产管理知识试题
建筑工程安全教育三级内容
 装配式预应力混凝土T型简支梁桥设计计算终稿
装配式预应力混凝土T型简支梁桥设计计算终稿
2023-08-14 49页
推荐-山东生鲜农产品冷链
2022-07-30 48页
[最新]八年级语文语文版上册第六单元检测题含答案详解
2023-01-30 8页
小学二年级上学期班主任工作计划
2023-01-17 20页
巡检机器人的调研报告
2022-08-16 12页
工资薪金制度
2023-08-25 15页
综治平安建设检查方案表
2023-04-10 4页
继电器的工作原理和作用
2022-09-30 19页
精品最全国际经济法题目及答案
2023-01-30 195页
北师大版七年级数学下:1.2幂的乘方与积的乘方同步练习及答案
2022-10-06 2页