
自动控制理论实验指导书
90页
1、绪 论随着现代科学技术的迅速发展,自动控制技术在许多工程领域(如电力工程、机械工程、化工工程、生物医学工程、航空航天以及交通运输等)有着广泛的应用。随着对自动控制系统性能要求不断提高,控制系统的结构也愈趋复杂,为了处理新的问题,需要新的分析方法。以频率法或根轨迹法为基础处理单输入单输出系统的问题,称为经典控制理论。随着科学技术的发展,为了适应各种更广泛、更复杂的控制要求,例如多输入多输出系统、时变系统等等,一种以状态空间为基础的现代控制理论迅速发展起来。应用现代控制理论,设计者可以按照所要求的各种性能指标,设计最优化的系统,即选用最合适的控制规律。控制理论所要处理的问题很多,这里只介绍最基本的三类问题: 第一类是研究系统的稳定性。所谓稳定性,就是指在受到扰动作用之后,系统的被控制量虽然偏离了原来的平衡状态,但当扰动撤离,经过一段时间后,如果系统仍然能回到原有的平衡状态,则称系统是稳定的。一个稳定的系统,当其内部参数稍有变化或者初始条件改变时,仍能正常地进行工作。考虑到实际系统在工作过程中的环境和参数的变化,因此在设计实际系统时不仅要求能稳定,还要求留有一定的稳定裕量。第二类是研究系统的
2、准确度(或称稳态精度)。系统的准确度是指在调整过程结束后,输出量与参考输入量之间的偏差。这种偏差越小,表示系统的输出跟随参考输入的精度越高。通常用阶跃、斜坡或抛物线输入系统后的稳态误差来评定。第三类是研究系统的动态性能指标。系统的动态性能指标有时域性能指标和频域性能指标两类。根据被控对象的不同,各种系统对上述三方面性能要求的侧重点也有所不同。例如随动系统对响应速度和稳态精度的要求较高,而恒值控制系统一般侧重于稳定性能和抗扰动的能力。在同一个系统中,三方面的性能要求又通常是相互制约的。随着对自动控制系统性能要求不断提高,控制系统的结构也愈趋复杂,为了处理新的问题,需要新的分析方法。以频率法或根轨迹法为基础处理单输入单输出系统的问题,称为经典控制理论。随着科学技术的发展,为了适应各种更广泛、 图0-1控制系统设计流程图更复杂的控制要求,例如多输入多输出系统、时变系统等等,一种以状态空间为基础的现代控制理论迅速发展起来。应用现代控制理论,设计者可以按照所要求的各种性能指标,设计最优化的系统,即选用最合适的控制规律。设计一个控制系统,可用图0-1的流程图来表示。当然,在具体的设计过程中,图中的
3、七个步骤不是截然分开的,各个方框之间要经过多次反复实验,使它们之间交叉联成一个整体。在设计和分析控制系统时,既要强调理论基础,又要重视实验技术。控制理论实验的主要任务是流程图中的中间三个步骤,即从进行性能分析到仿真实验。 实验研究的方法有两种:一种是在真实系统(称原型)上进行,另一种是在模型上进行。对于比较简单的被控对象,可以在实际系统上进行试验和调整,以获得较好的性能指标。但是在生产过程中,大部分的被控对象是比较复杂的,如火箭发射、反应堆控制、轧钢机调速系统、电力系统等等,考虑到安全性、经济性以及进行实验研究的可能性诸原因,在实际系统上进行实验,通常是不允许的。这时,就需要把实际系统建立成数学模型来进行研究,然后把对模型实验研究的结果应用到实际系统中去。这种方法叫做模拟或仿真研究,简称“仿真”。物理仿真就是用缩小(或放大)了的尺寸(或容量),制作与系统原型相同的模型,模型的变量与真实系统的变量完全一致。例如,要研究一个大功率的晶闸管直流调速系统我们可用小容量的电动机、发电机(作负载用)及小容量的晶闸管整流装置组成一个物理仿真系统。物理仿真造价较高,而且要作大量的安装、调整等工作,因而
4、准备的周期较长。数字仿真是将实际系统的运动规律用数学方程(一组微分方程或差分方程)来描述,然后用数字计算机来解数学方程。在数学仿真中,由于仿真模型和真实系统具有相同的数学模型。因此就动态性能而言,对模型的研究,就可以代替对真实系统的研究。数字仿真比物理仿真具有更广泛的用途,它可以对物理性质截然不同的许多控制系统进行研究。数字仿真的准备工作比物理仿真所需准备的工作量要小,周期也要短,所化的费用也少,试验数据的处理也简单,这是数字仿真比物理仿真发展更迅速的原因。控制理论实验分为两大部分:物理仿真。包括利用运算放大器的基本特性(开环增益高、输入阻抗大、输出阻抗小等),设置不同的输入网络和反馈网络来实现各种典型环节,再由各种典型环节按实验要求可连接起来构成整个系统的电子模拟装置以及小功率模拟随动系统。 数字仿真。主要包括基于MATLAB语言的控制系统分析和设计以及Simulink仿真。第一部分第一章 控制系统动态特性的时域及频域测试11 控制系统动态特性的时域测试 控制系统的动态特性是指系统在动态过程(过渡过程)中输出量对于输入量的时间函数关系。由于大多数控制系统是以时间作为独立变量的,因此系
《自动控制理论实验指导书》由会员s9****2分享,可在线阅读,更多相关《自动控制理论实验指导书》请在金锄头文库上搜索。
建筑工程安全生产规章制度.docx
2022年培训专员年度总结
土地组卷程序
电网基建项目可行性研究技术合同(汇编3篇).docx
2023年英文版本邀请函9范文.docx
三亮三比三评活动方案.doc
青海师大附属第二中学高二语文2012年期中考试100分.doc
基因的分离定律练习题.doc
小学语文学科练兵纲要.doc
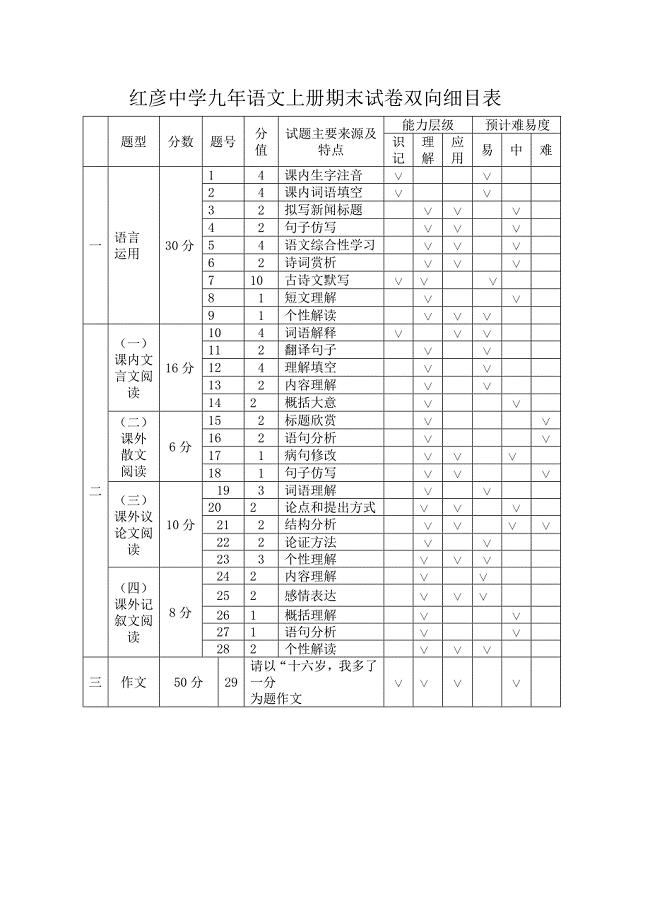
九年上册语文期末试卷双向细目表.doc
一年级心理健康教育计划.doc
语文教案-高梁情-教学教案

2023届北京六十六中学中考适应性考试英语试题(含答案解析).doc
关于房租租赁合同模板锦集五篇.docx
2023年竞选学生会演讲稿1737范文.docx
年产138万平方米钢化玻璃项目项目可行性计划书.doc
2023年医院门诊工作计划标准范本(4篇).doc
五年级第十册音乐教案.docx
关于在窗口单位和服务行业深入开展“四亮四创四评”活动实施方概要.doc
2008年高考四川卷理科综合能力测试.doc
 区文广新局政务公开整改报告
区文广新局政务公开整改报告
2023-12-04 2页
针刺伤的发生原因及护理人员的危害和预防
2024-02-18 8页
辽宁铁道职业技术学院单招语文模拟试题及答案
2022-09-01 9页
起重机厂房施工组织设计
2023-07-19 39页
幼儿“告状”行为的研究及其指导策略
2023-04-30 19页
浅议创业企业的财务风险
2024-02-04 13页
二十一世纪日本对印度尼西亚的援助-政策、实践与启示6100字
2023-05-25 5页
企业内部控制审计指引
2022-10-11 26页
中美大豆期货价格的均衡关系分析
2022-08-17 19页
2020年农机深松整地项目实施方案
2023-04-20 6页