
汽车电子控制系统及配件识别
11页
1、汽车电子控制系统及配件识别一、汽车电子控制系统随着汽车工业的发展,汽车电子控制技术也在不断的发展和完善,汽车电子控制的类型、项目越来越多,功能、手段越来越先进,进入了一个迅速发展的阶段。(一)汽车电子控制系统的类型1按汽车的总体结构分类 汽车电子控制系统可分为:发动机电子控制系统、底盘电子控制系统和车身电子控制系统三大类。2按控制功能分类汽车电子控制系统可分为:动力性、安全性、舒适性和娱乐通讯信息控制四种类型,其控制系统和主要控制项目见表4-12。表4-12 汽车电子控制系统主要控制项目类型控制功能系 统 名 称控 制 项 目汽车电子控制系统动力性控制电子控制燃油喷射(EFI)喷油量(喷油时间);喷油时刻;燃油泵;燃油停供电子控制点火(ESA)点火时刻;通电时间;爆震防止怠速转速控制(ISC)空调接通与切断;变速器挂档;动力转向泵接通与切断排放控制废气再循环(EGR);空燃比反馈控制;活性炭罐电磁阀控制;CO控制(VAF);二次空气喷射进气控制进气引导通路切换;涡流控制阀增压控制泄压阀;废气涡轮增压器自诊断测试与失效保护控制故障警告;存储故障代码;部件功能测试;传感器与执行器失效保护电
2、子控制变速(ECT)发动机输出扭矩;液力变矩器锁止时机;变速器换档时机;电磁阀和传感器失效保护安全控制防抱死制动控制(ABS)车轮制动力、滑移率驱动防滑控制(ASR)发动机输出扭矩;驱动轮制动力;差速器锁止安全气囊控制(SRS)气囊点火器点火时机座椅安全带收紧控制收紧器点火器点火时机动力转向控制ECPS控制助力油压、气压或电动机电流雷达车距控制车距;报警;制动汽车电子控制系统安全控制前照灯灯光控制焦距;光线角度安全驾驶监控驾驶时间;方向盘状态;驾驶员脑电图、体温和心率防盗控制报警;遥控门锁;数字密码点火开关;数字编码门锁;方向盘自锁电子仪表汽车状态显示中央门锁控制门锁遥控;行驶自锁;玻璃升降舒适性控制悬架控制(EMS)车身高度;悬架刚度;悬架阻力;车身姿势(点头、侧倾、俯仰)巡航控制(CCS)车速;安全(解除巡航状态)空调控制制冷;取暖电动座椅控制方向(向前、向后);高低(向上、向下)CD音响娱乐娱乐信息控制交通信息显示交通信息;电子地图车载电话通讯联络车载计算机车内办公每一个控制系统可以由各自的电子控制单元ECU(Electronic Control Unit)单独控制,也可由几个系
3、统组合起来用一个ECU进行控制。在不同车型上,其组合形式和控制功能不尽相同。在所有汽车电子控制系统中,发动机控制系统的结构组成最复杂、控制项目最多、控制功能最强,因此通常将发动机ECU称为主ECU。(二)汽车电子控制系统的控制方式汽车电子控制系统是由传感器、信息处理器和执行器三部分组成,如图4-80所示。传感器的功用是采集各种信息,信息处理器(即电子控制器ECU)的功用是分析处理传感器采集得到的各种信号,并向受控装置(即执行器)发出控制指令,执行器的功用是根据控制器的指令完成具体操作动作。 图4-80 电子控制系统的组成在汽车电子控制系统中,虽然实现相同控制目标或达到相同控制目的所设计的传感器和执行器并无实质性区别,但是电子控制器ECU的设计却千差万别。1开环控制在控制系统中,如果输出端与输入端之间不存在反馈回路,输出量对系统的控制作用没有影响,该系统就称为开环控制系统。在汽车电子控制系统中,燃油喷射式发动机的启动工况和加速工况以及汽车前照灯光束的控制就采用了开环控制方式。图4-81所示为一开环速度控制系统,它是根据控制信号的大小和方向来控制负载转速的高低和方向。其原理是控制信号经电子
4、放大器放大后,向电液控制阀输出一定大小的电流,控制阀就控制一定流量的传动液供给液压泵带动负载以一定的转速运转。这个系统对被控制量(负载转速)不进行任何检测,仅仅根据控制信号来对负载进行控制。图4-81 开环速度控制系统(a)系统原理图 (b)系统方框图2闭环控制在控制系统中,凡是系统的输出端与输入端之间存在反馈回路,即输出量对控制作用有直接影响的系统,就称为闭环控制系统。换句话说,反馈控制系统就是闭环控制系统。“闭环”的含意就是应用反馈调节作用来减小系统的误差。在图5-1-3所示的开环控制系统中,如果引入反馈回路,即用测速发电机直接检测被控制量(负载转速),然后反馈到输入端,则就构成一个闭环控制系统,如图4-82所示。控制信号(输入信号)和反馈信号之差,称为偏差信号。偏差信号输入控制器后,通过控制和调节作用来减小系统的误差,使系统的输出量趋于所希望的给定值,即通过反馈作用来减小系统误差。图4-82 闭环速度控制系统(a)系统原理图 (b)系统方框图闭环控制系统的突出优点是精度较高。无论什么干扰,只要被控制量的实际值偏离给定值,由于采用了反馈,对外界扰动和系统内部参数变化引起的偏差,系统
《汽车电子控制系统及配件识别》由会员s9****2分享,可在线阅读,更多相关《汽车电子控制系统及配件识别》请在金锄头文库上搜索。
建筑工程安全生产规章制度.docx
2022年培训专员年度总结
土地组卷程序
电网基建项目可行性研究技术合同(汇编3篇).docx
2023年英文版本邀请函9范文.docx
三亮三比三评活动方案.doc
青海师大附属第二中学高二语文2012年期中考试100分.doc
基因的分离定律练习题.doc
小学语文学科练兵纲要.doc
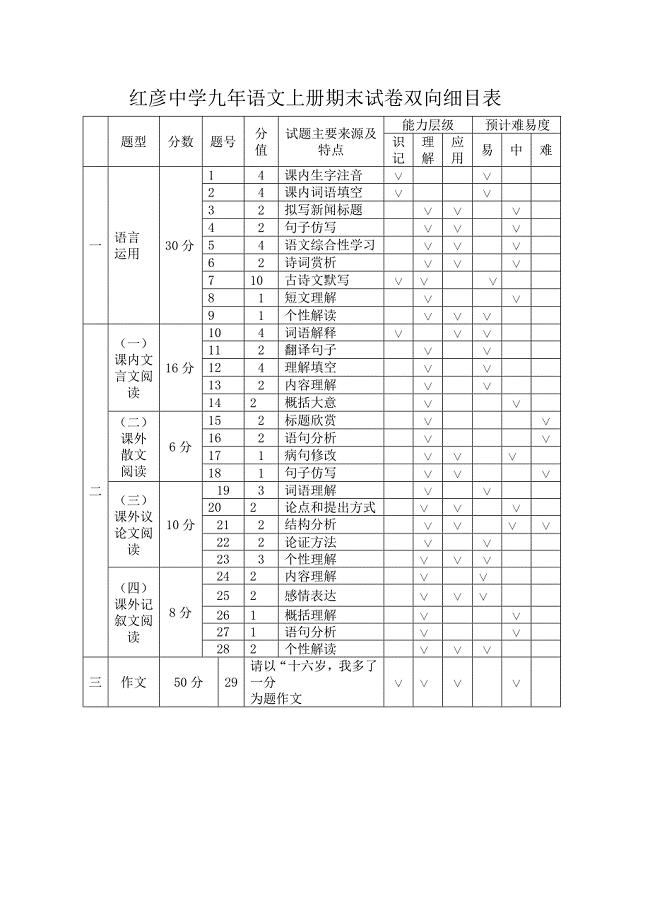
九年上册语文期末试卷双向细目表.doc
一年级心理健康教育计划.doc
语文教案-高梁情-教学教案

2023届北京六十六中学中考适应性考试英语试题(含答案解析).doc
关于房租租赁合同模板锦集五篇.docx
2023年竞选学生会演讲稿1737范文.docx
年产138万平方米钢化玻璃项目项目可行性计划书.doc
2023年医院门诊工作计划标准范本(4篇).doc
五年级第十册音乐教案.docx
关于在窗口单位和服务行业深入开展“四亮四创四评”活动实施方概要.doc
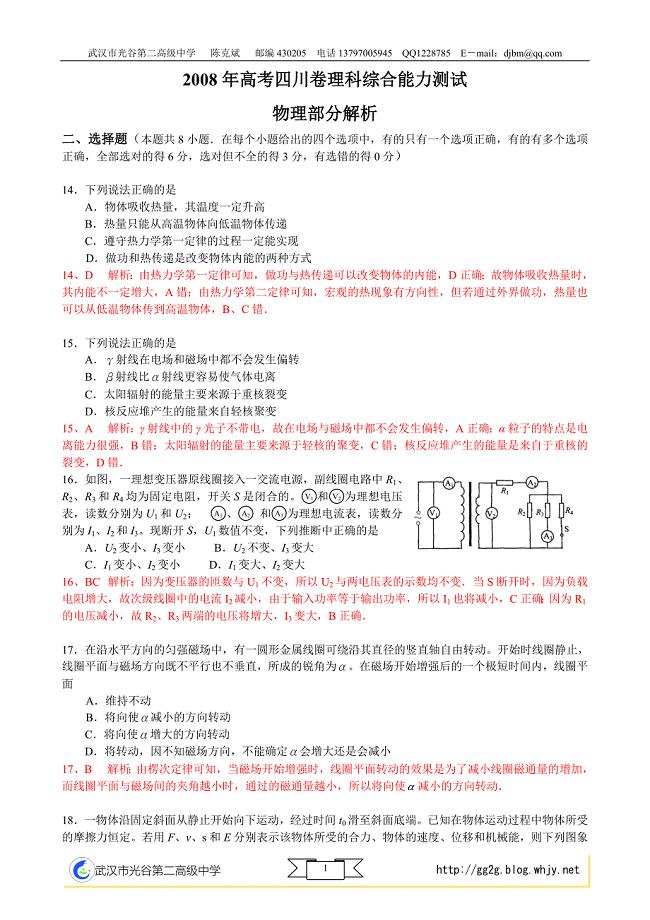
2008年高考四川卷理科综合能力测试.doc
 汽车站安全生产目标考核与奖惩办法
汽车站安全生产目标考核与奖惩办法
2022-11-05 5页
自动化测试与验证系统时选用NILabVIEW的10大理由
2024-03-13 2页
业务服务部门的工作管理制度
2022-11-26 4页
二手车电控系统常见故障解除
2022-10-10 2页
封锁234在小散系统中的实战应用
2023-01-13 5页
抗体类药物研发项目可行性研究报告模板-代写定制
2023-08-28 97页
机电联动系统联调记录
2022-12-15 3页
机电一体化控制系统组成及作用
2023-01-25 12页
汇隆智能拍摄系统设备
2023-07-15 2页
课题六冷却系统的检修第37-44节
2023-11-07 6页