
《电力拖动与控制系统》课程设计-异步电动机动态数学模型的建模与仿真
17页
1、武汉理工大学电力拖动与控制系统课程设计说明书目录摘要21设计意义及要求31.1设计意义31.2设计要求32异步电动机动态数学模型42.1异步电动机动态数学模型的性质42.2异步电动机的三相数学模型52.3 坐标变换72.3.1坐标变换的基本思路72.3.2三相-两相变换(3/2变换)7 2.4状态方程83模型建立103.1AC Motor模块103.2坐标变换模块113.2.1 3/2 transform模块113.2.2 2/3 transform模块123.3仿真原理图134仿真结果及分析145结论15参考文献16摘要对一个物理对象的数学模型,在不改变控制对象物理特性的前提下采用一定的变换手段,可以获得相对简单的数学描述,以简化对控制对象的控制。对异步电机的数学分析也不例外,在分析异步电机的数学模型时主要用到的是坐标变换。 当异步电动机用于机车牵引传动、轧钢机、数控机床、机器人、载客电梯等高性能调速系统和伺服系统时,系统需要较高甚至很高的动态性能,仅用基于稳态模型的各种控制不能满足要求。 要实现高动态性能,必须首先研究异步电动机的动态数学模型,高性能的传动控制,如矢量控制(磁场定向
2、控制)是以动态ab模型为基础的。关键字:异步电动机 数学模型 坐标变化 ab坐标系全套设计加扣 3346389411或3012250582异步电动机动态数学模型的建模与仿真1 设计意义及要求1.1设计意义学会分析异步电动机的物理模型,建立异步电动机的动态数学模型,并且推导出两相静止坐标系上的状态方程和转矩方程,利用Matlab/Simulink仿真工具把数学方程转变为模型。通过数学模型观察异步电动机在启动和加载的情况下,转速、电磁转矩、定子磁链和定子电流的变化曲线,同时分析各个变量之间的变化关系。进一步了解异步电动机的运行特性。1.2设计要求初始条件:1技术数据: 异步电动机额定数据:PN =3 kw, UN =380 V, IN =6.9 A, nN =1450 r/min, fN=50 Hz;Rs=1.85, Rr=2.658, Ls=0.2941 H, Lr=0.2898 H, Lm=0.2838 H;J=0.1284 Nm.s2, np=22技术要求: 在以 w-is-ys为状态变量的ab坐标系上建模要求完成的主要任务: 1设计内容:(1) 根据坐标变换的原理,完成ab坐标系上
3、的异步电动机动态数学模型(2) 完成以 w-is-ys 为状态变量的ab坐标系动态结构图(3) 根据动态结构图,完成异步电动机模型仿真并分析电动机起动和加载的过渡过程(4) 整理设计数据资料,完成课程设计总结,撰写设计说明书2 异步电动机动态数学模型2.1异步电动机动态数学模型的性质他励式直流电动机的励磁绕组和电枢绕组相互独立,励磁电流和电枢电流单独可控,若忽略队励磁的电枢反应或通过补偿绕组抵消之,则励磁和电枢绕组各自产生的磁动势在空间相差/2,无交叉耦合。气隙磁通由励磁绕组单独产生,而电磁转矩正比于磁通与电枢电流的乘积。不考虑弱磁调速时,可以在电枢合上电源以前建立磁通,并保持励磁电流恒定,这样就可以认为磁通不参与系统的动态过程。因此,可以只通过电枢电流来控制电磁转矩。在上述假定条件下,直流电动机的动态数学模型只有一个输入变量电枢电压,和一个输出变量转速,可以用单变量的线性系统来描述,完全可以应用线性控制理论和工程设计方法进行分析与设计。而交流电动机的数学模型则不同,不能简单地采用同样的方法来分析与设计交流调速系统,这是由于以下几个原因。(1)异步电动机变压变频调速时需要进行电压(或电
《《电力拖动与控制系统》课程设计-异步电动机动态数学模型的建模与仿真》由会员re****.1分享,可在线阅读,更多相关《《电力拖动与控制系统》课程设计-异步电动机动态数学模型的建模与仿真》请在金锄头文库上搜索。
小学四年级语文上册期中测试卷(汇总).doc
中学生升旗演讲稿
2023年06月山西运城盐湖区校园招考聘用高素质青年人才85人笔试参考题库附答案详解
独家代理合同范本
2023年湖北省襄阳市谷城县石花镇殷畈村社区工作人员考试模拟试题及答案
电子申报设备通信服务协议.doc
甘肃省天水市秦安县二中2023学年高三下学期一模考试英语试题含解析.doc
成本会计课后练习题
月子饮食的11个禁忌.doc
人教版小学数学五年级下册教学计划例文(二篇).doc
自考税收筹划习题
2023年雪二年级作文86范文.docx
自动化系统产品.doc
热门商铺经营权转让合同
简爱深度解析
591UP历史资源-河北省唐山市2012届高三.doc
如何辨析同义词
冠名权合作协议书模板(3篇).doc
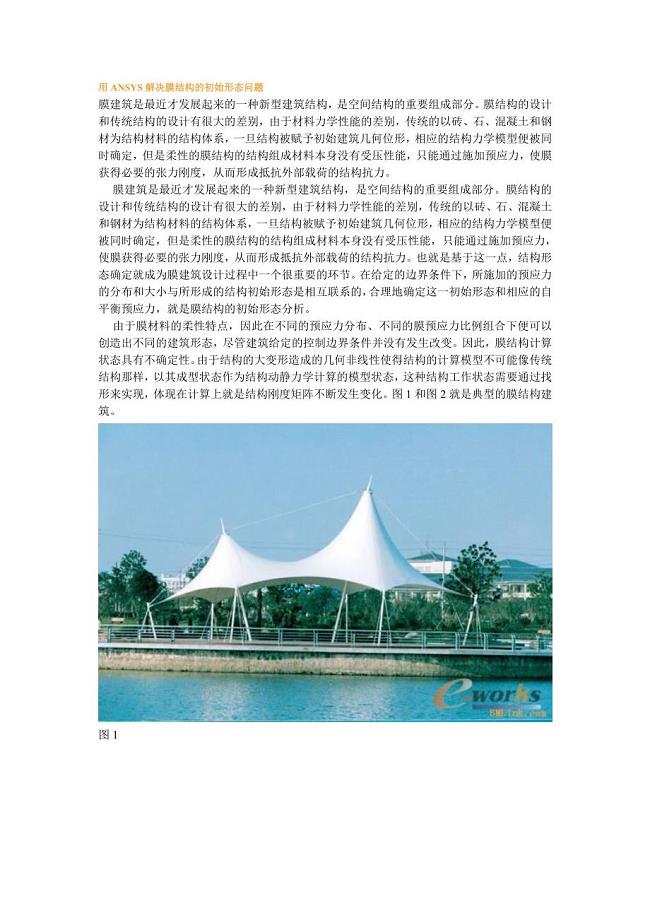
用ANSYS解决膜结构的初始形态问题.doc
2022年人教版三年级科学上册期末考试题及答案【1套】.doc
 电子琴实验报告-乐曲硬件演奏电路设计
电子琴实验报告-乐曲硬件演奏电路设计
2022-10-20 14页
毕业论文-基于人工神经网络的刀具状态识别系统设计
2022-10-20 35页
毕业设计(论文)-多工位专用CA18机床机械手的设计(全套图纸三维)
2023-02-16 28页
采矿工程毕业设计(论文)-同煤集团四老沟煤矿3-5#煤层矿井设计
2023-12-18 54页
毕业设计(论文)开题报告-等精度测频法的频率计设计
2023-06-08 4页
汽车设计课程设计-英菲尼迪Q70L轿车离合器设计
2023-08-08 15页
跨视听通道的注视线索效应
2023-10-07 21页
环境整治施工组织设计
2023-11-18 90页
卡盘体零件的工艺规程及钻3-Φ32孔的钻床夹具设计
2023-10-24 57页
过程工艺与设备课程设计-丙烯—丙烷精馏塔工艺设计
2024-02-11 43页