
PUMA机器人工作空间大作业
11页
1、2016 年 秋 季学期研究生课程考核(读书报告、研究报告)考核科目: 机器人技术 学生所在院(系): 机电工程学院学生所在学科: 机械设计及理论学 生 姓 名: 学 号: 学 生 类 别: 考核结果阅卷人PUMA机器人 建立坐标系 建立的坐标系如下图所示: 给出D H参数表 根据建立的坐标系,确定D H参数表如下:表1 D - H参数表连杆i运动范围1= 90- 9000-160 1602= 00-225 453= - 90- 900-45 2254= 0900-110 1705= 0- 9000-100 1006= 000-266 266其中: 推导正运动学、逆运动学(1) 正运动学推导如下:根据坐标系建立的原则,可以通过旋转和位移建立相邻的坐标系和的间的关系:1) 将轴绕轴转角度,将其与轴平行;2) 沿轴平移距离,使与轴重合;3) 沿轴平移距离,使两坐标系的原点和X轴重合;4) 绕轴旋转角度,两坐标系完全重合。最终得到如下公式:通过计算得:根据式 (1) 和表1所示的连杆参数,可求得各连杆的变换矩阵如下:, , , 各连杆的变换矩阵相乘,得到该机器人的机械手变换矩阵:将求得的各连
2、杆变换矩阵带入相乘,得到机械手的变换矩阵为:其中: (2) 逆运动学推导如下: (取)1) 求用逆变换 左乘方程 (2) 两边,即有: (4)令矩阵方程 (4) 两端的元素相等,可得:利用三角代换:式中,。把代换式 (6) 代入式 (5) 得:式中,正、负号对应于的两个可能解。2) 求矩阵方程两端的元素(1,4)和(2,4)分别对应相等平方和为:其中解得:3) 求在矩阵方程两边左乘逆变换。方程两边的元素(1,4)和(3,4)分别对应相等,得联立,得和和表达式的分母相等,且为正,于是 根据解和的四种可能组合,可以得到相应的四种可能值,于是可得 的四种可能解式中取与相对应的值。4) 求令两边元素(1,3)和(2,3)分别对应相等,则可得只要,便可求出当时,机械手处于奇异形位。5) 求根据矩阵两边元素(1,3)和(2,3)分别对应相等,可得6) 求根据矩阵两边元素(2,1)和(1,1)分别对应相等,可得 从而求得 用Matlab编程得出工作空间工作空间:机器人的手臂或手部安装点所能到达的所有空间区域,不包括手部本身所能到达的空间区域。可将第5个坐标系的坐标原点看作手部安装点,计算工作空间时,
《PUMA机器人工作空间大作业》由会员公****分享,可在线阅读,更多相关《PUMA机器人工作空间大作业》请在金锄头文库上搜索。

教研部职责教研部工作职责模板(3篇).doc
2023年幼儿园后勤工作总结标准范文(3篇).doc
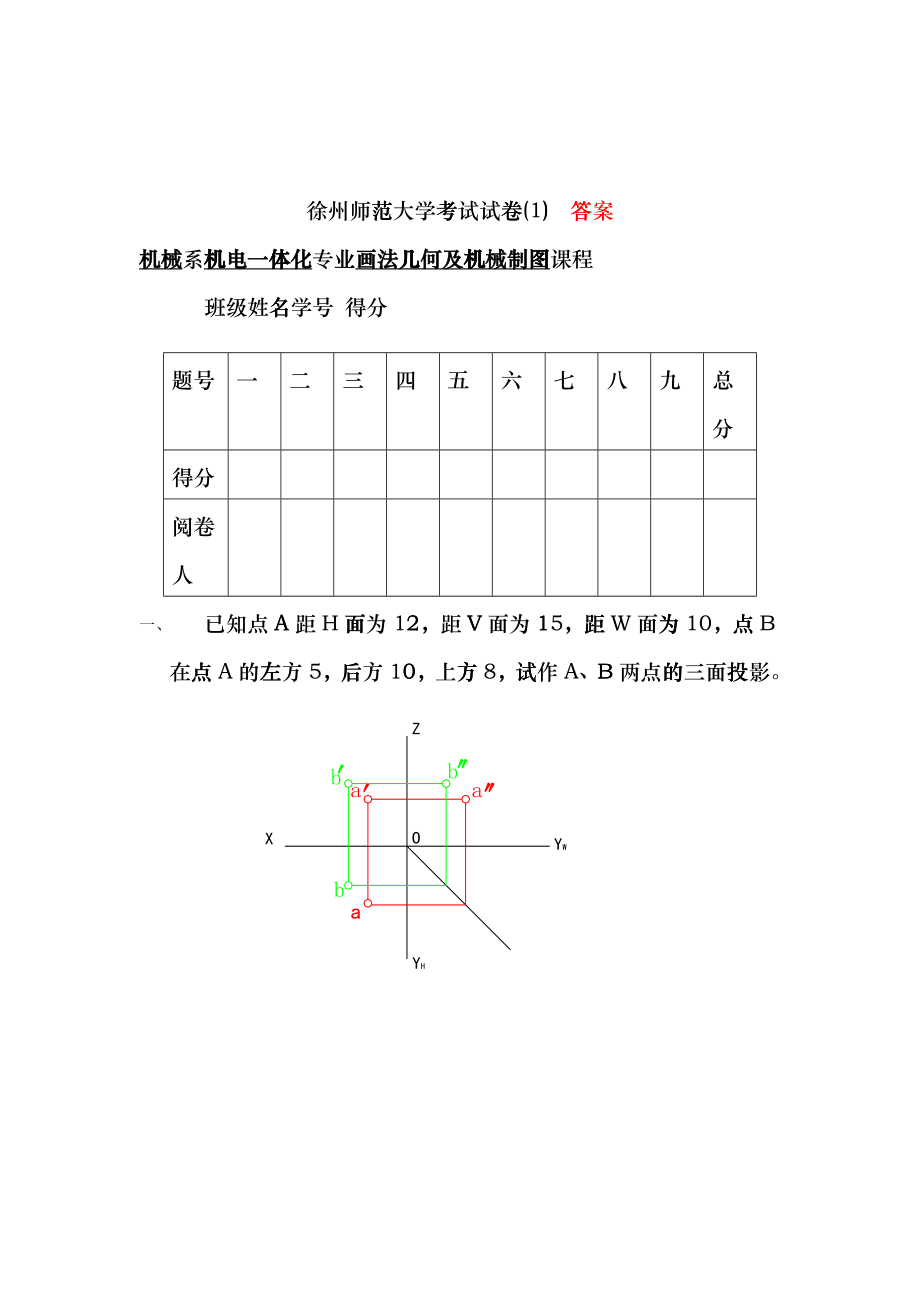
机械制图试卷及答案diqu
初中化学上册17单元知识点总结材料.docx
城管理综合行政执法xx年工作总结和xx年工作计划
大枣.山楂.红豆.绿豆.瘦身粥.doc

2012年八年级下学期期中试卷.doc
运输合同(水路1).doc
拟出访美国四州的简介.doc
邮政储蓄银行某支行-劳动合同
彩虹班班级管理加分扣分细则
体育局上半年工作总结及下半年工作打算.docx
2023届江西省吉安市峡江县中考数学考前最后一卷含解析

幼儿园托班故事教案《--不听话的小鸡宝宝》.doc
热水器安装详细过程.doc
体育课队列练习基本口及动作要求.doc
2023年版煤矿井下电气考试内部模拟题库全考点含答案.docx
so引导的倒装句.doc
2019年房地产项目工作总结4篇.doc
2023年政府系统各行各业政务信息要点.docx
 工序生产检验记录
工序生产检验记录
2022-10-09 5页
标识、储存、包装、搬运、防护标准
2022-10-23 6页
受力分析经典题及答案
2022-09-26 7页
井底1煤仓施工组织
2022-08-27 20页
2021年小学生课外阅读知识竞赛初赛试题.doc
2022-11-18 8页
固体废物的处理与利用实验指导书样本.doc
2023-06-24 12页
中国石油大学华东21春《化工热力学》离线作业一辅导答案14
2023-07-11 12页
小学重叠词语集锦
2023-01-02 5页
苏教版四下语文总复习(课文内容填空)
2023-07-21 10页
计算机信息工程学院团委学生会规章制度样本.doc
2023-02-07 10页