
曲柄摇杆机构matlab优化设计
8页
1、基于MATLAB的曲柄摇杆机构优化设计1问题的提出根据机械的用途和性能要求的不同,对连杆机构设计的要求是多种多样的, 但这些设计要求可归纳为以下三种问题:(1)满足预定的运动规律要求;(2)满 足预定的连杆位置要求;(3)满足预定的轨迹要求。设实际的函数为二f (申)(称为再现函数),而再现函数一般是与期望函数 不一致的,因此在设计时应使机构再现函数 = F G )尽可能逼近所要求的期望函 数 = f ( ) 2.曲柄摇杆机构的设计I分别是曲柄AB、连杆BC、4在图1所示的曲柄摇杆机构中,i、l、l、123摇杆CD和机架AD的长度。这里规定申为摇杆在右极限位置时的曲柄起始位0 0置角,它们由/、1设计时,可在给定最大和最小传动角的前提下,当曲柄从申转到申+ 90。时,0 0要求摇杆的输出角最优地实现一个给定的运动规律f (9)。这里假设要求:2(1)= f (申)=+(申-申)2E03 兀0对于这样的设计问题,可以取机构的期望输出角 = f (J和实际输出角E= F )的平方误差之和作为目标函数,使得它的值达到最小。2.1设计变量的确定决定机构尺寸的各杆长度i、i、i和i,以及当摇杆按
2、已知运动规律开始1234运行时,曲柄所处的位置角p应列为设计变量,即:0x = l l l l p t12340考虑到机构的杆长按比例变化时,不会改变其运动规律,通常设定曲柄长度l =1.0,在这里可给定l =5.0,其他杆长则按比例取为l的倍数。若取曲柄的初始141位置角为极位角,贝及相应的摇杆l位置角0均为杆长的函数,其关系式为:p = arc cos |0I (l1+ 12)2 + T 一 132= (l + 12)2 一 132 + 25 L 2 (l +1) l j10 (l +1) j(3),r(l +1 )2 l2 l2 r(1 +1)2 l2 25 0 = arc co s I 124| = I 23|0 L21314j L1013j(4)因此,只有l、 l为独立变量,则设计变量为x = l l T =x23x T。22.2目标函数的建立目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指2f (x)=z(0 一0 ) T m inEiii = 10 -期望输出角;m-输出角的等分数;Ei标来建立,即:(5)0 -实际输出角,由图可知:i式中,兀一a 卩(0
《曲柄摇杆机构matlab优化设计》由会员公****分享,可在线阅读,更多相关《曲柄摇杆机构matlab优化设计》请在金锄头文库上搜索。
八上语文复习.doc
《我的幸运一天》大班语言教案.doc
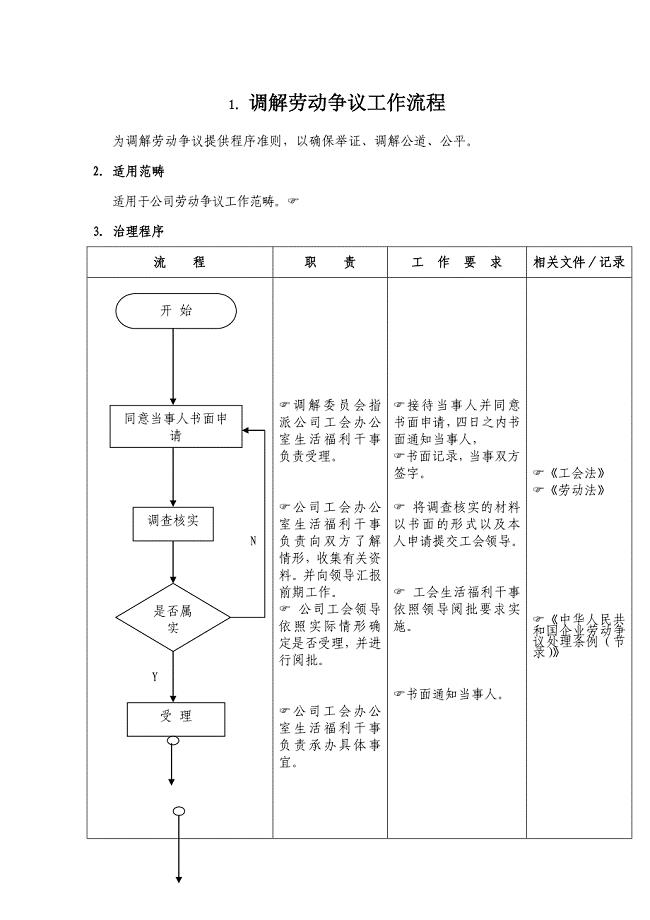
调解劳动争议工作流程.doc
八上unit10导学案.doc
深圳某物业管理公司的组织结构
合作开发市场协议.doc

趣味活动策划方案通用15篇
工程造价实习报告3000字.doc
卓顿心理实验智能云平台介绍.doc
2023年调研报告的撰写要求合集.docx
传统营生宝典《营生集》(整理版).doc
农村小学语文个性化阅读教学研究.doc
粮食烘干及成套设备的发展前景及建议.doc
2023年大学大功率电器检讨书2.docx

制药厂百级净化区域施工工艺.doc
高职高专英美文学教学研究
2018年生态环境保护督察方案.doc
山村教学设计李艳锋.doc
中考前心态调整-专家为你开出“定心丸”.docx
餐饮部主管年终工作总结.docx
 鱼类生理学试题2
鱼类生理学试题2
2023-07-27 14页
计算机网络技术发展研究
2023-08-05 4页
1200打印机设置及打印11
2024-03-10 7页
厂用电中断事故现场处置方案
2022-12-19 5页
数据结构课程设计指导书
2023-10-16 19页
实验二箔式应变片三种桥路性能比较
2022-12-30 2页
多路彩灯控制器的设计1
2023-09-25 9页
CPA注册会计师《公司战略与风险管理》章节知识点归纳
2024-03-04 11页
最常见的近红外光谱的预处理技术的综述
2023-06-12 26页
水平多层介质反射波的时距曲线
2023-03-18 10页