
4系统稳定性分析
17页
1、4 系统稳定性分析稳定性描述当系统遭受外界扰动偏离原来的平衡状态,在扰动消失后 系统自身能否恢复到原来平衡状态的一种性能。一个不稳定系统是不能正 常工作的,如何判别系统的稳定性以及如何改善系统的稳定性是系统分析 与设计的首要问题。所以讨论稳定性时只考虑的自由系统。Lyapunov 稳定性考虑阶自由系统:状态向量:,向量:对,若存在某一状态点,使得对所有的都为系统的平衡状态(平衡点) 一个系统不一定存在平衡点,但有时又可以有多个平衡点。平衡点大多数 在状态空间的原点。若平衡点不在原点,而是状态空间的孤立点,则可以 通过坐标变换移到原点。经典控制理论:用传递函数描述线性定常系统,主要用特征函数的极点分布、Routh (劳斯)判据、Hurwitz (胡尔维茨)判据、Nyquist (奈 奎斯特)判据等来判别系统的稳定性。现代控制理论:用状态空间描述MIM0线性时变系统或非线性时变系 统。根据系数矩阵的特征值即系统极点的分布来判别系统的稳定性。求出 的是“既能控又能观”的极点,它也可以由传递函数求出;求出的是“能 控不能观”、求出的是“不能控能观”、求出的是“既不能控又不能观” 部分的极点,他
2、们由于“零极点相消”不能反映在传递函数中,因而也不 能由传递函数求出;Lyapunov 间接法:通过求解系统的动态方程(求解困难甚至求解不 出,受到很大限制!),再根据解的性质判断系统的稳定性;Lyapunov 直接法:不通过求解系统的动态方程,只通过构造Lyapunov 标量函数直接判定系统的稳定性。4.1.1Lyapunov 稳定性定义定义 4-2(Lyapunov 临界稳定)对任意给定的“小距离”(无论多么 小的),总可以根据给定的和初始时间找到一个“半径”,只要系统初态 与平衡点的距离小于“半径”时,就有任何时状态与平衡点的距离小于给 定的“小距离”,则称平衡状态是 Lyapunov 稳定()。如果不需根据 初始时刻来寻找“半径”,则称一致稳定()。称多维空间距离Euclid 范数(4-2)这就是说:根据指定的小和系统的初始状态,以平衡点,以后系统的 状态就只能在指定的范围内运行,在平衡点附近振荡,称为Lyapunov临 界稳定。如果我们只根据指定的小就能划定一个半径为的范围,使系统只 能在指定的范围内运行,称为一致Lyapunov稳定图 4-1 小球的稳定性图4-2 李氏稳定
3、定义4-3 (渐近稳定,局部稳定)系统不仅Lyapunov稳定,而且, 则称平衡状态是渐近稳定()。如果不需根据初始时刻来寻找半径,则称 一致渐近稳定。物理意义:系统状态开始在平衡点附近,则系统状态轨线最终落在平 衡点。只有渐近稳定才是工程意义上的稳定。但渐近稳定仍然是某平衡点附 近的稳定(局部稳定),并不意味着整个系统就能运行。图 4-3 渐进稳定(局部稳定)图 4-4 全局稳定图 4-5 不稳定定义 4-4 若对任意初始状态,都有,则称平衡状态是大范围渐近稳定 物理意义:无论开始系统状态在何处,其状态轨线最终会落在平衡点定义 4-5(不稳定)对任意给定的“小距离”,无论“半径”怎么小 系统至少有一个初态,当,则有任何时候的状态与平衡点的距离大于给定 的“小距离”,则称平衡状态是不稳定(李氏不稳定)。几何意义是: 无论系统初始状态如何接近平衡点,状态远离平衡点不会回到原平衡点或 原平衡点附近。Lyapunov间接法判别稳定性定理 4-1 状态稳定性(内部稳定性)判别定理间接法。判断平衡点的稳定性。的特征值,所对应的约当块是二维的是不稳定平衡点。,显然,当, 有是不稳定平衡点。由此不难
4、得出:“渐近稳定”的结论(2)和“不稳定”的结论(3)*非线性系统的稳定性间接法稳定性判别定理只能用于线性系统,因此,对于非线性系统, 必须先作线性化处理,是高阶导数项。(4-3)令,则(4-4)在系统一次近似的线性化方程基础上,Lyapunov给出如下结论:分析系统平衡的稳定性系统非线性通常有多个平衡点。令,可求出系统的平衡点:将系统在处线性化:其特征值,表明非线 性系统在处不稳定。将系统在处线性化:其特征值的实部为零,不能来判断系统在处是否 稳定。Lyapunov 直接法判别稳定性)力学原理:消耗能量能量,吸收能量能量电学原理:放电能量,充电能量,但系统能量图 4-6RC 电路的充放电过程(1)若能量变化小于零,系统渐近稳定;(2)若能量变化大于零, 系统不稳定(3)若能量变化等于零,系统“临界稳定”。分析系统(1) 电感、电容都是线性的,(例 4.1.1);(2)电感、电容都是线性的, (例 4.1.2);(3)电感是线性的,电容具有非线性的库伏特性,(例4.1.3); RLC串联电路系统解:(1)当电感、电容都是线性的,以电感磁通和电容电荷为状 态变量,可写出状态方程,该电路无
《4系统稳定性分析》由会员枫**分享,可在线阅读,更多相关《4系统稳定性分析》请在金锄头文库上搜索。
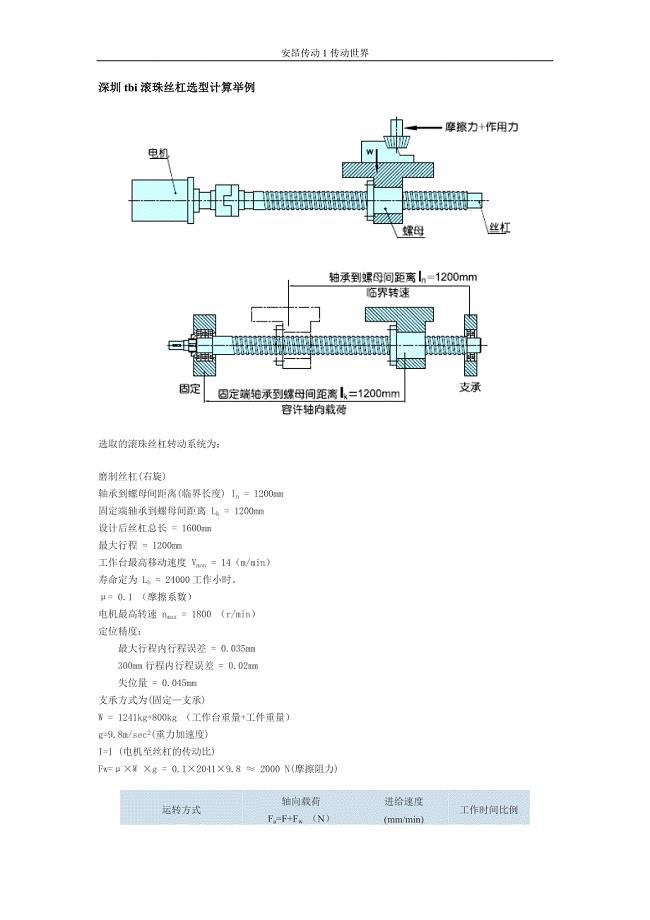
深圳tbi滚珠丝杠选型计算举例.doc
诵读欣赏《曹刿论战》教案教学设计(苏教版九年级上册)
血液系统疾病护理常规.doc
IE浏览器主页被篡改的解决方法10招.doc
论昌九工业走廊发展.doc
负弯矩张拉施工方案.doc

2021年创新举措强质量,,增强实效促发展我区提案工作的主要做法新编.DOC

生理学名词解释285条(含答案)79357.doc

【推荐下载】qq《建筑施工组织》教案.doc
桩板墙工程施工方案.doc
部编版三年级道德与法治上册期中测试卷(下载).doc
人生励志演讲稿【三篇】.docx
仁爱版英语七年级下册测试题U5单元测试
如何培养学生的英语自学能力.docx
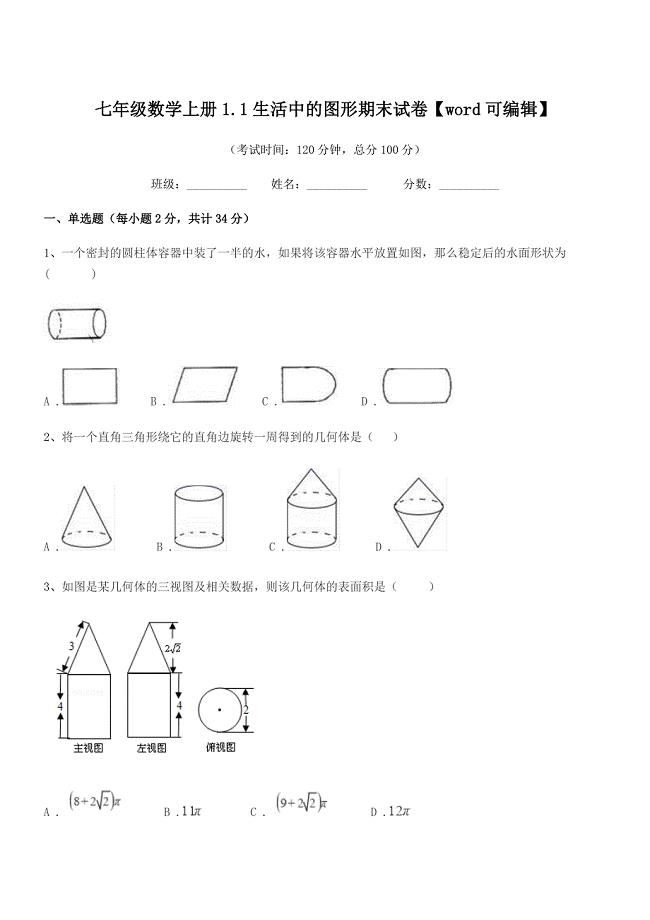
2018-2019学年榆树市八号镇中学七年级数学上册1.1生活中的图形期末试卷【word可编辑】.docx

抗震救灾资料.doc
基因概念之演变.doc
2023年辅导学生工作总结.doc
展业成本不征个税-证券经纪人税负减轻-财税法规解读获奖文档.doc
2022年消防安全班会课的教案模板
 初中一般现在时练习题及答案
初中一般现在时练习题及答案
2023-08-17 8页
带班育人方略(1)
2022-12-24 4页
自动控制原理自动称重系统
2023-02-01 7页
长春市卫生服务业发展报告
2023-06-07 10页
外派、外聘培训相关流程
2023-07-18 2页
触发器是构成时序逻辑电路的基本单元
2023-01-10 7页
复试群面(无领导小组讨论)流程安排
2023-04-12 4页
保洁区域重点作业流程
2023-03-02 9页
劳动合同主体变更合同协议书范本-最终版
2022-09-07 5页
电工技术复习提纲
2023-05-17 13页