
爬壁幕墙清洗机器人设计说明书
16页
1、江西省其次届高校朝气械创新设计大赛暨第三届全国高校朝气械创新设计大赛江西赛区选拔赛设 计 说 明 书INSTRUCTION OF DESIGN作 品 名 称 “小蜘蛛”幕墙攀爬清洗机 参 赛 队 伍 陈明登 谢信韦 冯江涛 刘连杰 郭晓欢 指 导 老 师 李国臣 吴文通 参 赛 单 位 井 冈 山 大 学 2008年4月18日目 录摘要i小蜘蛛幕墙攀爬清洗机设计说明书1作品内容简介11 研制背景及意义12 主要功能和性能指标23 设计方案33.1 机械机构33.2 限制机构34 理论设计计算44.1 真空吸附力计算44.2 幕墙清洗机器人附着的力学分析55机构设计与工作原理75.1攀爬机构85.2清洗机构85.3铰接连杆支撑机构95.4换气机构96创新点及应用107作品实物工作图118应用前景13参考文献14摘 要:“小蜘蛛”幕墙攀爬清洗机是基于昆虫攀爬动作的仿生原理制作而成。在国内外现有的壁面移动机器人探讨成果的基础上,结合高空作业的特点,在对幕墙清洗机器人的共性问题附着技术、爬行技术、清洗技术进行分析的基础上。模拟昆虫交织攀爬的动作,设计了自攀爬机构,实现了吸附机构、清洗机构和攀爬
2、机构的有机结合。“小蜘蛛”幕墙攀爬清洗机主要包括攀爬运动机构、吸附机构、清洗机构和限制系统等四部分组成,机械结构设计中敏捷运用了四杆机构、曲柄滑块机构、齿轮机构、离合器和限制机构等,结构丰富,其创新点主要体现在:1)仿昆虫攀爬动作,采纳丝杠传输机构与连杆铰接支架的升降机构,实现清洗设备的腿足式交织移动。2)仿人工清洗习惯动作,采纳曲柄滑块机构,实现玻璃幕墙的往复式擦洗。3)采纳连杆铰接支架的升降限制吸附机构限制阀门的开启与关闭,通过单片机限制,实现机构移动、换气机构与清洗机构的有机结合。本产品可广泛用于高楼大厦的幕墙清洗,设备结构简洁、灵活便捷,实现了幕墙清洗的自动化,将人类从原始的高强度的高空作业中解脱出来。试验表明,此型清洗机器人清洗效果明显,操作便利,对同类设备的设计有很好的参考价值。关键词:幕墙清洗 玻璃幕墙 机器人 负压吸附“小蜘蛛”幕墙攀爬清洗机设计说明书设计者:陈明登,谢信韦,冯江涛,刘连杰,郭晓欢(井冈山高校工学院,江西 吉安 343009)作品内容简介“小蜘蛛”幕墙攀爬清洗机是基于昆虫攀爬动作的仿生原理制作而成。其主要特点是在模拟昆虫交织攀爬动作的基础上,依据高楼幕墙
3、清洗的特点,在对幕墙清洗机器人的共性问题附着技术、爬行技术、清洗技术进行分析的基础上。设计了结构简洁、敏捷便捷的自攀爬清洗机器人。“小蜘蛛”幕墙攀爬清洗机主要包括攀爬运动机构、吸附机构、清洗机构和限制系统等四部分组成,机械结构设计中敏捷运用了四杆机构、曲柄滑块机构、齿轮机构、离合器和限制机构等,机械结构丰富,其创新点主要体现在:1)仿昆虫攀爬动作,采纳丝杠传输机构与连杆铰接支架的升降机构,实现清洗设备的腿足式交织移动。2)仿人工清洗习惯动作,采纳曲柄滑块机构,实现玻璃幕墙的往复式擦洗。3)采纳连杆铰接支架的升降限制吸附机构限制阀门的开启与关闭,通过单片机限制,实现机构移动、换气机构与清洗机构的有机结合。本产品可广泛用于高楼大厦的幕墙清洗,实现了幕墙清洗的自动化,将人类从原始的高强度的高空作业中解脱出来。试验表明,此型清洗机器人清洗效果明显,操作便利,对同类设备的设计有很好的参考价值。1 研制背景及意义随着城市现代化的发展,特殊是高层建筑的兴起,以玻璃幕墙为代表的幕墙结构逐步演绎成华丽的“城市外衣”,就在实现它的功能和实效的同时又衍生出了下一个问题繁重的幕墙清洗任务,并且很多国家已对建筑
4、幕墙的清洗要求做出了明确规定。此外,越来越奇妙的建筑结构使清洗的难度成倍增加,甚至采纳传统的清洗方法己无能为力。然而,在社会文明高度发展的今日,对生命的关爱达到了前所未有的高度,要求停止运用蜘蛛人的呼声不绝于耳。因此人们期盼新的具有人性化的清洗方式出现。目前大多是用人工清洗,若是低些的幕墙的还好,但现在几十、几百米的幕墙水随处可见,那么幕墙的清洗问题变成了令人们头疼的一件事了。而传统的吊篮人工操作清理的方式既危急和枯燥,劳动强度又高。为了弥补现实生活中存在的这一缺陷;为了在清洗工作自动化上能贡献我们的一点力气与实力;也为了更好的在生活中实现清洗作业的节能操作;同时,还为了实现高新技术的绿色、环保,造福我们的子孙后代。20世纪90年头以来,随着电子技术的飞速发展和自动扮装备的不断成熟,日本的探讨人员领先将目光投向自动化的清洗方式,由此幕墙清洗机器人应运而生。目前幕墙清洗机器人技术及其理论的探讨已成为热点,国内外很多科研单位都在进行相关方面的探讨并取得可喜成果。但是,探讨工作仍旧处在样机的研制和试验阶段,而幕墙清洗机器人的关键技术与理论则有待于进一步深化探讨。本文的探讨目的就是要在幕墙清洗
《爬壁幕墙清洗机器人设计说明书》由会员公****分享,可在线阅读,更多相关《爬壁幕墙清洗机器人设计说明书》请在金锄头文库上搜索。
推进流动人口计生基本公共服务均等化试点.doc
推土机安全管理规定.docx

行政后勤个人工作总结(3篇).doc
肩关节功能评价量表.doc
2023年幼儿园中班班级工作总结(10篇).doc
对于大学生励志演讲稿全新集合
让双网卡一台电脑拥有两个网关.doc

环保型涂料加工项目可行性论证报告.doc
寒假医院社会实践报告_8.doc
机器设备租赁合同标准模板(9篇).doc
小学二年级描写秋天的古诗(20首).docx
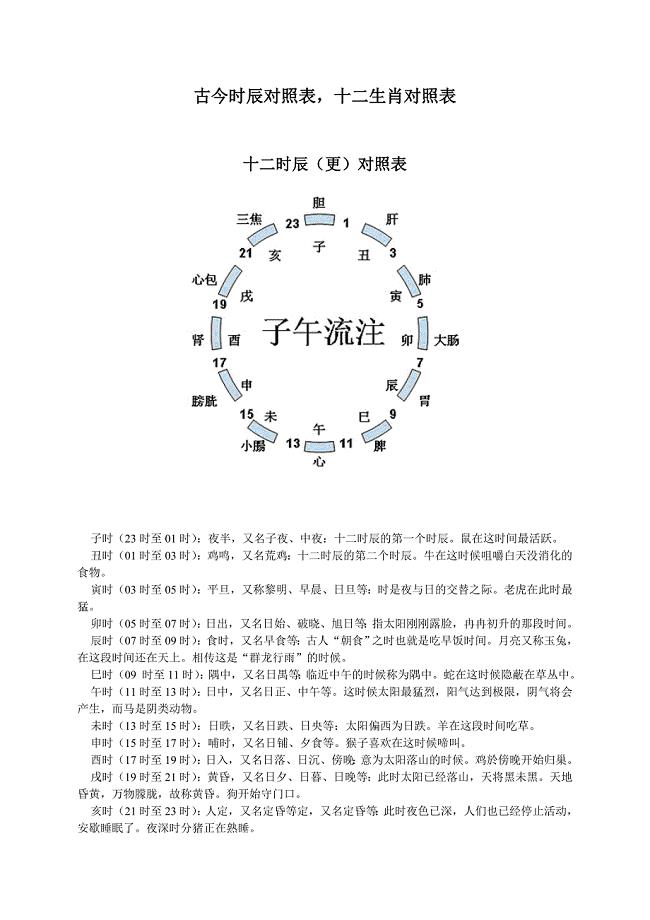
古今时辰对照表,十二生肖对照表.doc
北京市西城区初三物理一模试题及答案

小学“教学中的互联网搜索”教案
判断推理讲座讲义 主要图形推理技巧 超好用.doc
学生会成员2023个人工作计划例文(2篇).doc
工作总结班组长月度工作总结范文
影响超声波清洗效果的因素.doc

黑龙江省哈尔滨市阿城区100万只年芦花鸡养殖基地可行性论证报告.doc
借款还款协议书电子版(四篇).doc
 汽车专业英语术语
汽车专业英语术语
2024-03-04 19页
学生会部门工作总结汇编十篇.doc
2023-09-26 29页
雨季路面施工措施
2023-08-24 10页
建立细胞培养室需购买有关仪器及设备的申请报告
2024-01-23 10页
教育心理学知识点整理
2023-08-29 7页
电动吊篮的安全验收与检查要点
2023-01-29 5页
来料加工合同书样本(5篇).doc
2023-09-01 18页
二级建造师建设工程法规及相关知识考前后两套题目之一
2024-02-11 26页
质量风险评估管理规程
2023-07-31 9页
2023年疫情让我们学会了自律作文800字范本五篇(完整)
2022-09-14 12页