
毕业论文-工业机器人结构设计
29页
1、工业机器人结构设计1 绪论1.1前言工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科机械手工程。机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。机械手的结构形式开始比较简单,专用性较强。 随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。1.2 工业机械手的简史现代工业机械手起源于20世纪50年代初,是基于示教再现和主从控制方式、能适应产品种类变更,具有多自由度动作功能的柔性自动化产品。机械手首先是从美国开始研制的。1958年美国联合控制公司研制出第一台机械手。他的结构是:机体上安装一回转长臂,端部装有电磁铁的工件抓放机构,控制系统是示教型的。1962年,美国机械铸造公司在上述方案的基础之上又试制成一台数控示教再现型机械手。商名为Unimate(即万能自动)。运动系统
2、仿造坦克炮塔,臂回转、俯仰,用液压驱动;控制系统用磁鼓最存储装置。不少球坐标式通用机械手就是在这个基础上发展起来的。同年该公司和普鲁曼公司合并成立万能自动公司(Unimaton),专门生产工业机械手。1962年美国机械铸造公司也试验成功一种叫Versatran机械手,原意是灵活搬运。该机械手的中央立柱可以回转,臂可以回转、升降、伸缩、采用液压驱动,控制系统也是示教再现型。虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制一种Unimate-Vic-arm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差可小于1毫米。美国还十分注意提高机械手的可靠性,改进结构,降低成本。如Unimate公司建立了8年机械手试验台,进行各种性能的试验。准备把故障前平均时间(注:故障前平均时间是指一台设备可靠性的一种量度。它给出在第一次故障前的平均运行时间),由400小时提高到1500小时,精度可提高到0.1毫米。德国机器制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业。德国KnKa
3、公司还生产一种点焊机械手,采用关节式结构和程序控制。瑞士RETAB公司生产一种涂漆机械手,采用示教方法编制程序。瑞典安莎公司采用机械手清理铸铝齿轮箱毛刺等。日本是工业机械手发展最快、应用最多的国家。自1969年从美国引进二种典型机械手后,大力研究机械手的研究。据报道,1979年从事机械手的研究工作的大专院校、研究单位多达50多个。1976年个大学和国家研究部门用在机械手的研究费用42%。1979年日本机械手的产值达443亿日元,产量为14535台。其中固定程序和可变程序约占一半,达222亿日元,是1978年的二倍。具有记忆功能的机械手产值约为67亿日元,比1978年增长50%。智能机械手约为17亿日元,为1978年的6倍。截止1979年,机械手累计产量达56900台。在数量上已占世界首位,约占70%,并以每年50%60%的速度增长。使用机械手最多的是汽车工业,其次是电机、电器。预计到1990年将有55万机器人在工作。 第二代机械手正在加紧研制。它设有微型电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。研究安装各种传感器,把感觉到的信息反馈,使机械手具有感觉机能。目前国外已经出
4、现了触觉和视觉机械手。第三代机械手(机械人)则能独立地完成工作过程中的任务。它与电子计算机和电视设备保持联系。并逐步发展成为柔性制造系统FMS(Flexible Manufacturing system)和柔性制造单元(Flexible Manufacturing Cell)中重要一环。随着工业机器手(机械人)研究制造和应用的扩大,国际性学术交流活动十分活跃,欧美各国和其他国家学术交流活动开展很多。1.3工业机械手在生产中的应用机械手是工业自动控制领域中经常遇到的一种控制对象。机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛。在现代工业中,生产过程中的自动化已成为突出的主题。各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。可在机械工业中,加工、装配等生产很大程度上不是连续的。据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。从这里可以看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化
《毕业论文-工业机器人结构设计》由会员鲁**分享,可在线阅读,更多相关《毕业论文-工业机器人结构设计》请在金锄头文库上搜索。
房地产企业销售未完工产品企业所得税处理几个问题的解答-财税法规解读获奖文档.doc
交通运输局2018年三季度工作总结.doc
一年级下册数学期末试卷
2022年甘肃省临夏市数学八上期末经典试题含解析.doc
2023年节能减排倡议书三篇.docx

2021年学校“停课不停学”线上教学活动工作汇报精选新编.DOC
2023学年福建省龙岩一中学分校化学九年级上册期中预测试题含解析.doc
2022年人教版四年级科学上册期中考试及答案【免费】.doc
2课我用残损的手掌.doc

防弹少年团线上毕业典礼致辞.docx

2023年期货从业人员后续培训铝的品种基础.doc
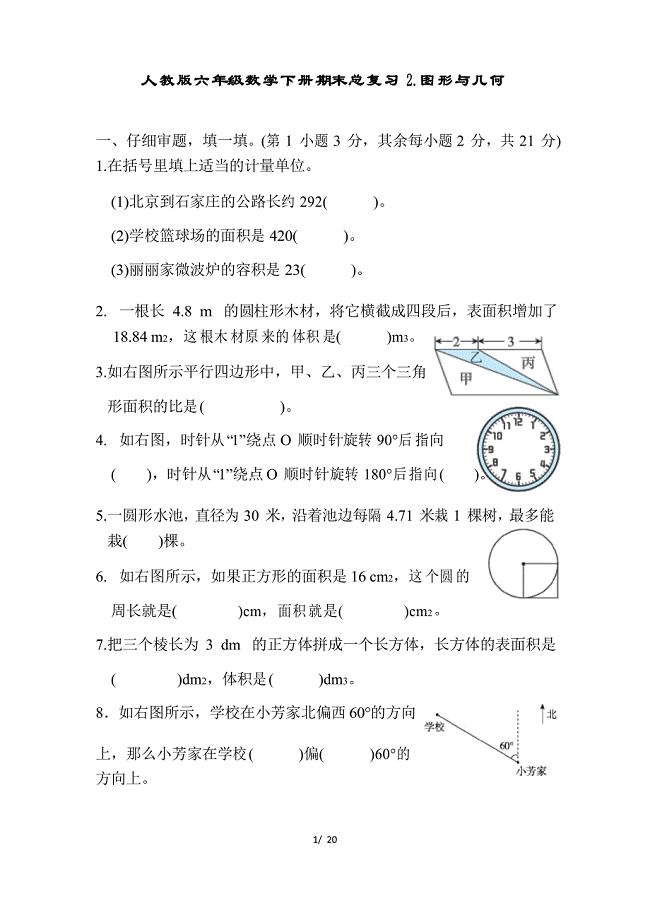
人教版六年级数学下册2.图形与几何
最新2023个人房屋租赁合同范本.doc

2023年政府网站五年来的工作 汇报.doc
食品中汞的存在形态及其毒性研究进展1
深基坑水泥搅拌桩灌注桩施工方案设计
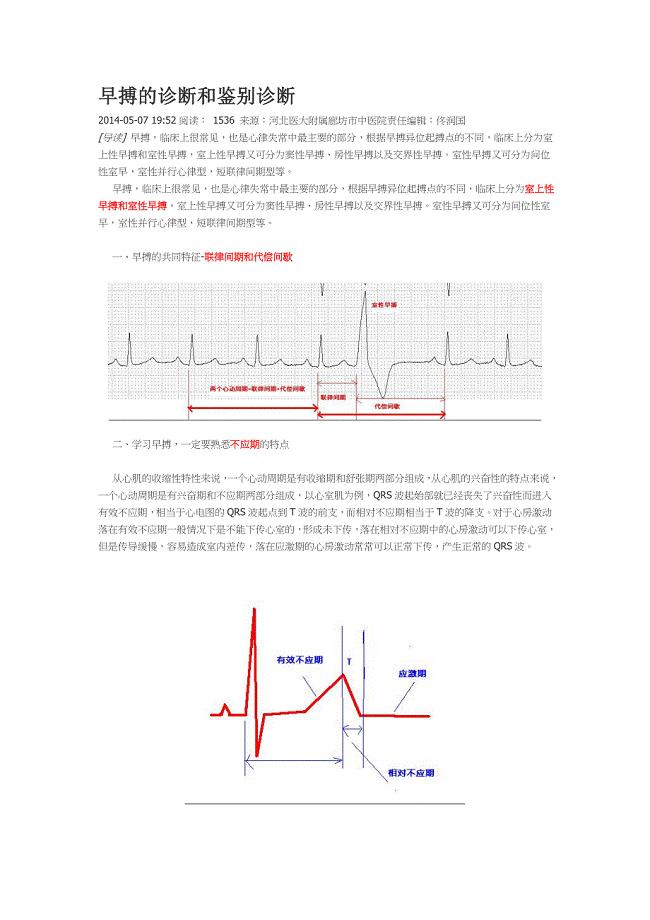
早搏的诊断和鉴别诊断.doc

室内装饰效果图.doc
2023年竞聘格式演讲稿9范文.docx

2023年放射诊疗防护专项监督检查工作总结(范文).doc
 高科技生态示范园投资建设可行性分析论证研究报告
高科技生态示范园投资建设可行性分析论证研究报告
2023-07-18 106页
新《施工方案》天合园安装工程施工组织设计方案
2022-12-30 63页
七年级数学水平测试《一元一次方程》
2022-11-15 2页
2021年公立普惠性幼儿园通用幼教教师课程指南优质小班心理健康教案多篇汇总版
2023-02-27 58页
铁路防护棚架施工设计方案
2024-01-24 10页
土地整理及土地整理效益的概念和内涵(DOC 43页)
2024-03-03 46页
第1课艺术源于生活高于生活
2023-01-05 2页
大米企业QS质量管理手册
2023-09-08 58页
深基坑水泥搅拌桩灌注桩施工方案设计
2023-05-25 42页
公交车身广告
2023-10-19 4页