
四旋翼飞行器
6页
1、四旋翼飞行器的结构形式和工作原理1.结构形式直升机在巧妙使用总距控制和周期变距控制之前,四旋翼结构被认为是一种最简单和最直观的稳定控制形式。但由于这种形式必须同时协调控制四个旋翼的状态参数,这对驾驶员认为操纵来说是一件非常困难的事,所以该方案始终没有真正在大型直升机设计中被采用。这里四旋翼飞行器重新考虑采用这种结构形式,主要是因为总距控制和周期变距控制虽然设计精巧,控制灵活,但其复杂的机械结构却使它无法再小型四旋翼飞行器设计中应用。另外,四旋翼飞行器的旋翼效率相对很低,从单个旋翼上增加拉力的空间是非常有限的,所以采用多旋翼结构形式无疑是一种提高四旋翼飞行器负载能力的最有效手段之一。至于四旋翼结构存在控制量较多的问题,则有望通过设计自动飞行控制系统来解决四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。四旋翼飞行器的结构形式如图1.所1示。屯屯.3rtflL4图1.1四
2、旋翼飞行器的结构形式飞行控制计算机支架2.工作原理典型的传统直升机配备有一个主转子和一个尾桨。他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定所以需要一种能够长期保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。3V122(u)滚转运动旧)偏航运动、y丿垂直运动2上丿俯仰运动Y22(f)侧向运动图1.2四旋翼飞行器沿各自由度的远动(亡)前后运动四旋翼飞行器结构形式如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。四旋翼飞行
《四旋翼飞行器》由会员M****1分享,可在线阅读,更多相关《四旋翼飞行器》请在金锄头文库上搜索。
小学大队委竞选演讲稿集合7篇
2023年高中生学年评语.docx
2023年人事干部科长竞岗演说材料.DOCX
王之涣的诗登楼远眺
2023家长会优秀家长主持发言稿范文.docx
汽车基础知识试题答案
2023年江苏中考物理仿真试卷三)初中物理.docx
县区马王堆街道街道安全生产工作调研报告
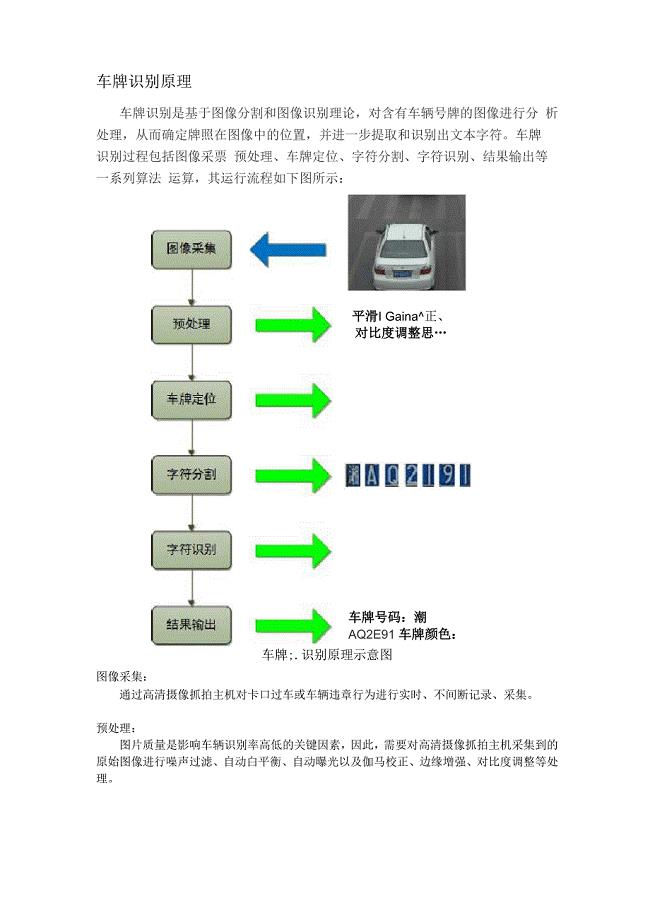
车牌识别原理简介
17年6月考试Java语言程序设计I考核作业
济南市存量房屋买卖中介协议书范本(2篇).doc
2023年度健康教育工作计划.docx
中专生实习自我鉴定(WORD版).docx
青正当时联手创未来直播观后感心得五篇

人事行政专员工作总结范文(三篇).doc
2023年青年文明号口号范文.docx
县志办2023年纪检监察工作半年总结.docx
2023年社区环境卫生个人优质工作总结例文参考范文.docx
HR认为好简历应当具备的五大特征
2022年大学生夜不归宿的检讨书【新版】
 石楼职中未成年人不良行为矫治实施方案
石楼职中未成年人不良行为矫治实施方案
2022-08-14 7页
办公文档范本学校各部门行政岗位职责
2022-11-14 5页
-中考生物第二单元生物体的结构层次第3课时显微镜的结构和使用课时作业
2023-09-23 16页
VANKE新动力培训方案
2023-06-08 8页
暑假青年教师大学学习总结
2022-08-09 3页
2023离婚协议
2023-09-05 3页
墩柱盖梁监理实施标准细则
2023-10-13 29页
小区广告协议
2023-09-15 5页
读书演讲稿范文五篇
2024-01-18 7页
爱惜环境倡议书
2023-02-02 10页
思想政治一轮复习笔记南充市医疗保险跟踪服务申请表2017年规范汉字听写比赛试卷龙潭古隧道总报告(样板)唐伯虎介绍及作品赏析ppt变压器冷却器带电水冲洗标准化作业反搏原理、临床适应症、禁忌症.高考总复习地理练习:高考热考图表系列 (十五)人口统计图的判读 Word含解析.doc高考总复习地理练习:高考热考图表系列 (九)等温线图的判读 Word含解析高考总复习地理练习:高考热考图表系列 (八)锋面气旋图的判读 Word含解析高考总复习地理练习:高考热考图表系列 (十三)地质剖面图的判读 Word含解析高考总复习地理练习:高考热考图表系列 (六)等压线图的判读 Word含解析