
搬运码垛机器人毕业设计(参考)
46页
1、某某科技大学本科生毕业设计 目录1绪论11.1研究背景及意义11.2国内码垛机器人的研究现状21.3码垛机器人的开展趋势42设计方案52.1设计要求52.2 机构组成52.3码垛机器人途径规划73起升机构设计计算93.1 起升机构电机选择9起升机构电机容量选择93.2 起升机构钢丝绳选择选择与计算10钢丝绳绳经的选择103.3卷筒的设计与计算113.4 起升机构减速器选择123.5起升机构联轴器的选择144旋转机构设计计算164.1旋转机构电机选择164.2旋转机构减速器选择184.3旋转机构联轴器的选择194.4旋转机构齿轮传动设计214.5旋转机构齿轮传动强度校核244.6旋转机构轴的设计计算27最小轴径确定27二轴的构造设计及强度校核28二轴上深沟球轴承校核335堆垛机构设计计算345.1堆垛机构电机选择345.2堆垛机构平台设计365.3槽轮机构设计365.4堆垛机构减速器的选择375.5堆垛机构联轴器的选择385.6堆垛机构轴最小直径计算39结论41致谢42参考文献43第 3 页某某科技大学本科生毕业设计 1绪论1.1研究背景及意义随着现代社会科技程度日新月异的变化,机器人技
2、术已经浸透到人类生活中的方方面面,演着不可替代的角色。机器人是多个学科技术综合而成的产物,其应用程度已经逐渐宽广起来研究机器人已经成为了当今时代的趋势。机器人的应用状况已经可以作为权衡一个国家现化程度上下的重要因素。 从机器人工作的环境来对机器人进展分类,大体上能划分成两种,就是工业机器人与特种机器人。工业机器人是一种具有良好性能的自动化机械装置,是典型的含有很高科技含量的机电一体化产品。它在进步产品质量、增加经济效益、进步消费率方面起着重要作用。同时工业机器人的开展情况也是日新月异的,所以研发工业机器人是一件刻不容缓的事情。码垛是随着物流产业的不断壮大而开展起来的一项高新技术,其思想是把物品按照一定规律码放在托盘上,从而可以使物品的存放、搬运、转移等活动变成单元化操作,从而大大进步物流运输的效率。 在物料质量不大、尺寸不大、码垛速度要求不高的情况下,码垛工作都是通过人工来实现的。后来为了减轻工人在码垛时的工作强度,产生了托盘操作机、工业机械手等一些比拟简单的机械设施。但是随着人们对码垛速度要求的不断进步,传统的人工码垛方式越来越难以到达人们的要求,这种情况下码垛机器人应运而生。 作为
3、工业机器人典型的一种,码垛机器人技术近几年有着非常快速的开展,这样的开展速度和当今世界制造业的小批量、多种类的开展形式是非常吻合的。码垛机器人有着工作才能强、运行速度快、体积比拟小、抓取种类多、应用范围广等特点,从而在市场上备受青睐,正因为这些优点,才使得码垛机器人被普遍应用于制造业、码垛、装配、焊接等诸多操作中。近年来,袋装物品的需求和产量都非常宏大,进而对袋装物品进展运输的需求也在急剧增长。在我国有大量的袋装物品需要进展码垛、卸垛和运输。目前,对袋装物品的火车运输来讲,火车站台卸车、站台码垛、运输装车、运输卸车、库房码垛等工作一般均为人力操作,这样做极大地消耗了人力物力。尤其是在环境比拟恶劣的情况下,工作本钱会很大且效率比拟低。而结合了机器人技术和码垛技术的码垛机器人既可以大幅度地进步工作效率,又可以大大增强工作过程中的平安性,从而节约了大量的人力资源,有很大的经济和现实意义。自从上世纪70年代码垛领域有了机器人技术的加盟之后,机器人码垛技术获得了很大的打破,抓取货物类型、抓取速度和运行过程中的准确性、稳定性都在不停地晋级。码垛机器人的这些优点会使码垛机器人的广泛使用变为一种不可阻
4、挡的趋势,会拥有极其广阔的应用前景。 人类科技文明的不断进步大大促进了人们对更有效工作方式的渴望,减少劳动强度,以及更加高效、高质量地完成码垛工作已经逐渐被人们重视起来。各行各业对其劳动效率和工作要求都在不断的进步,因此在码垛工作上也在寻找着更加方便、有效的工具来更好地完成各项任务,但是传统的码垛方式因为其种种弊端,已经越来越难以满足企业的需求了。近几年来,码垛机器人在各行各业的应用在逐渐增多,特别是在物流运输过程中有着举足轻重的作用,尤其是自动化仓库的出现,更加引导了码垛机器人的开展。 目前我国的码垛设备根本上是进口的,国内的码垛机器人研发技术还不是非常成熟,我国的码垛机器人研究程度和国外还有着很大差距。中国又是一个劳动力密集型的开展中国家,消耗人力资源进展的工作特别多,随着我国对码垛机器人的不断需求与我国码垛机器人技术落后之间的矛盾日益突出,开发和研究自己的码垛机器人就显得刻不容缓。1.2国内码垛机器人的研究现状国内的机器人相关技术起步比拟晚,20 世纪 70 年代,国内才开场引进机器人技术,因为当时受着很多因素的限制,开展相对缓慢,研究程度也较低。到了 80年代,我国的机器人程度
《搬运码垛机器人毕业设计(参考)》由会员工****分享,可在线阅读,更多相关《搬运码垛机器人毕业设计(参考)》请在金锄头文库上搜索。
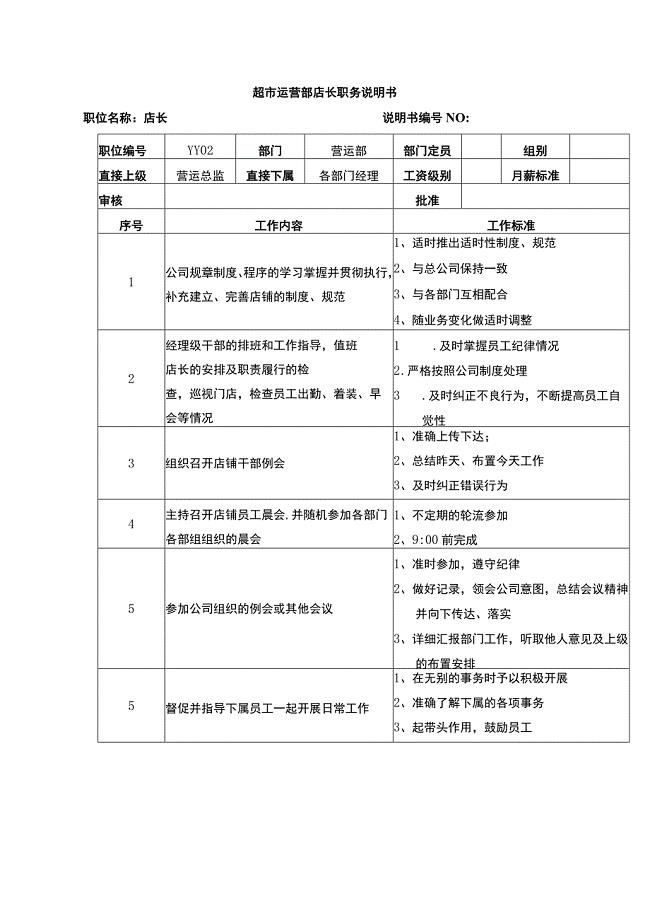
超市运营部店长职务说明书
劳动合同企业劳动合同管理制度范本.doc
超声波焊接技术大全.doc
医院党内议事制度办法
1511一级第一章规划练习题及其答案课件
【初中语文】记叙文:美丽的校园-语文素材-中考网.doc
结婚函调报告表
毕业生就业推荐表个人自荐信范文5篇.doc
2023财产赔偿协议书范文(2篇).doc
共建和美校园文化-培养学生良好习惯
公司XX年上半年工作总结及下半年工作计划.docx
2022年实用的仓库个人工作总结4篇
道家思想当代的积极和消极影响
我的伯父鲁迅先生 (3).doc

中考英语培训心得体会.doc

我的理想班级
优势与劣势作文
把握正确的刷牙方法-儿童刷牙的正确方法.docx
年产240万吨热轧带钢工艺设计.docx
中考作文形式创新技巧
 江苏省中小企业创新能力建设
江苏省中小企业创新能力建设
2023-04-25 6页
预检分诊点(台)卫生监督流程
2023-02-09 12页
房地产的商业模式-冯仑
2024-02-01 11页
社会组织孵化基地管理办法
2023-01-19 12页
静脉用药配置中心制度;
2023-01-19 11页
开发区改革创新发展的若干意见(2)
2022-10-19 38页
金丰易居金福得报告
2023-03-08 43页
烟台啤酒某某有限公司考核设计方案
2023-12-15 102页
进销存管理系统-课程设计报告
2023-03-29 26页
岗位职责模板(1)
2023-08-03 32页