
PID控制原理与参数整定方法
7页
1、PID 控制原理与参数整定方法一、概述PID 是比例-积分-微分控制的简称,也是一种控制算法,其特点是结构改变 灵活、技术成熟、适应性强。对一个控制系统而言,由于控制对象的精确数学模型难以建立,系统的参数 经常发生变化,运用控制理论综合分析要耗费很大的代价,却不能得到预期的效 果,所以人们往往采用 PID 调节器,根据经验在线整定参数,以便得到满意的 控制效果。随着计算机特别是微机技术的发展,PID控制算法已能用微机简单实 现,由于软件系统的灵活性,PID算法可以得到修正而更加完善。我们阳江基地有数以千计的采用 PID 控制的调节器,用于温度控制、压力 控制、流量控制,在塑杯及灌装生产过程中,发挥着重要的作用。因此,学习 PID控制的基本原理,合理的设计PID控制系统,用好、维护好这些调节器,对 提高产品质量,降低废品率,节约能源具有十分重要的意义。本课程从系统的角 度,采用多种分析方法,详细讲解经典 PID 控制的基本原理和 PID 参数的整定 方法,简介现代数字PID控制思想,希望对大家使用PID调节器有所帮助。二、调节系统的品质和特性一个调节系统的品质可以用静态品质和动态品质来衡
2、量。所谓静态品质就是 系统稳定后,被控参数与给定值间的差值的大小。偏差愈大则静差愈大,静差愈 小静态品质愈好。当系统受到扰动后或整定在一个新值时需要在较短时间内过渡到稳定,不发 生振荡和发散,这便是衡量系统动态特性的指标。一个好的调节系统应该二个品 质都好。但动静态品质往往是相互矛盾的,要静差小,系统的放大倍数就要大, 系统放大倍数愈大则系统愈不稳定,即动态品质不好。图1-1收敛型1图1-2收敛型2 图1-3发散型落图1-4振荡型图1-1至1-4是几种典型的控制曲线,只有图1-1表示动静态品质都好。一般的调节系统都具有惯性和滞后两种特性/只是大小不同而已。这两个特 性应从控制对象,控制作用这两个方面去理解。弄懂以上关于调节系统的几个基 本概念,对于理解PID控制的原理有很大的帮助。三、PID控制的基本原理PID控制是按偏差信号的比例(P)、积分(I)和微分(D)进行控制,数字 PID控制是计算机来实现连续PID控制功能的一种算法。模拟或数字控制,按控 制作用的形式分为以下几种。1、比例控制作用(简记P),它是指控制器的输出与输入偏差(也即误差) 信号成比例,比例控制的算法为:u(t)二
3、Kpe(t)式中e(t)-偏差信号;u(t)-控制器输出信号;Kp-比例增益。比例控制器实际上是一个可调增益的放大器,比例控制能迅速反映误差,从 而减小误差,但不能消除稳态误差,比例系数的加大,会引起系统的不稳定。例 如会出现图1-4所示振动等。这就是说,比例控制不能处理好动静态品质这一矛 盾。在比例控制的基础上,引入积分控制作用,可以解决这一矛盾。2、积分控制作用(简记I)积分控制作用的算法如下:u(t)二KJ e(t)dt式中$为积分增益。当有偏差信号e(t)时,则控制的输出将不断增加,直到偏差信号为零,积分控制作用可以消除静差,但它有滞后现象,会使系统超调量加 大,甚至使系统出现振荡,必须与比例环节同时使用。图2-1所示,是一个滞后时间短,惯性小的调节系统,采用PI控制获得理 想控制效果的图形,为了分析简单,将图2-1画成以偏差信号表示的图形,如图2-2,当系统受到扰动时,能很快恢复正常。图2-2t如图2-3所示,在图2-3中,t=t时e(t)=O,:,=0,随着时间的增加,丿J的值也不断增加,直到t1o e(t)=0时,丿J的值达到最大。也 就是说,在t1时刻偏差为零,积分控制
《PID控制原理与参数整定方法》由会员夏**分享,可在线阅读,更多相关《PID控制原理与参数整定方法》请在金锄头文库上搜索。
浅谈森林病虫害的防治策略.docx
麻醉科实习生自我鉴定
中学校本培训工作计划(四篇)
大理新能源电池项目分析报告
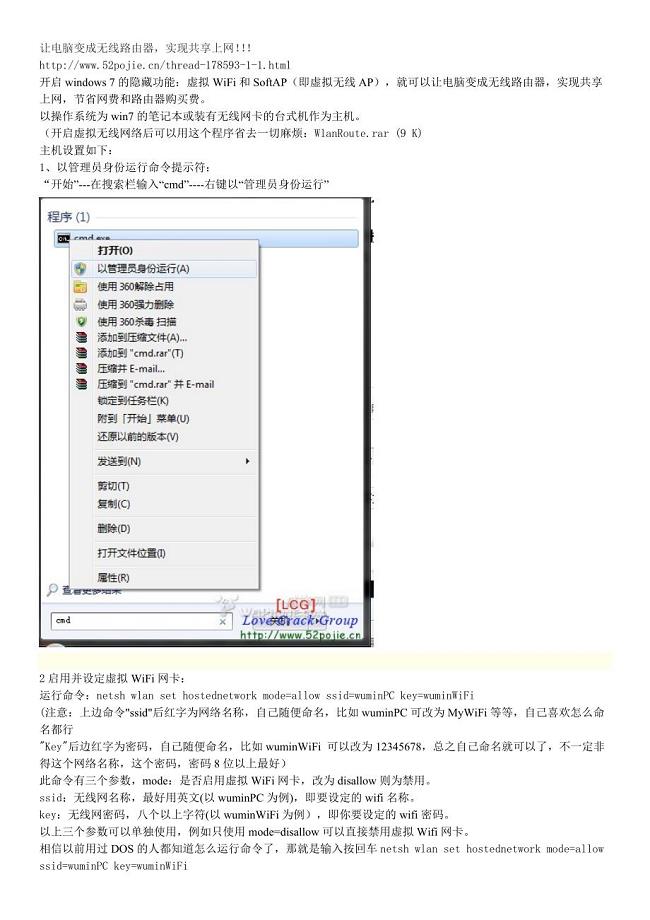
让电脑变成无线路由器,实现共享上网!!!.docx
ERP沙盘实训心得
渐开线圆柱齿轮1.doc
生态学复习重点.doc
2019迎国庆走进花博会研学旅行综合实践活动方案.docx
二年级数学教学工作计划参考范文(2篇).doc
精选热门三字经读后感范文示例三篇
长整数加减运算实验报告.doc
![[其他资格考试]2011年一级建造师《建设工程法规及相关知识》考点解析_secret.doc](https://union.152files.goldhoe.com/2023-1/19/4bd1588c-3dea-43de-82fd-2fefbbf66c3c/pic1.jpg)
[其他资格考试]2011年一级建造师《建设工程法规及相关知识》考点解析_secret.doc

2019零序电流互感器安装注意事项.docx
2023年门架安全操作3篇
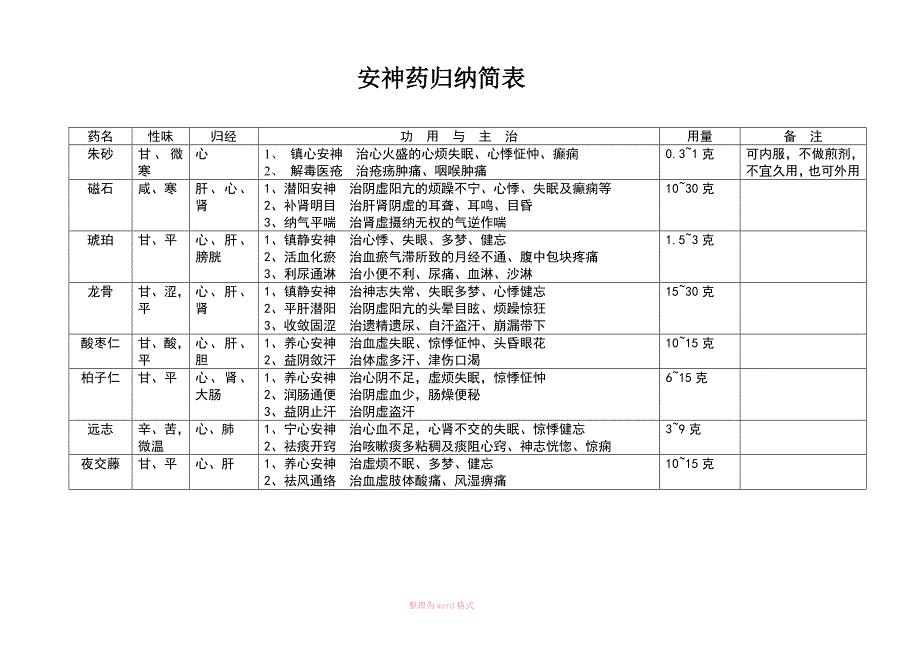
中药药性归类总汇
泊松分布的应用
20XX年区青少年法制教育工作总结及今后打算
三下乡社会实践心得体会范文【可编辑】
三门峡扎啤机项目申请报告_参考范文
 浅谈现代住宅建筑设计
浅谈现代住宅建筑设计
2023-03-28 5页
一个完整的软件开发流程
2023-02-21 4页
喷浆支护方案
2024-02-22 6页
长方形卫生间装修设计
2024-02-03 2页
市场与市场营销 1
2023-01-12 15页
旅游公路工程结算审计实施方案
2023-05-12 17页
猝死应急预案及处理
2023-03-11 5页
行政管理学第二次计分作业
2023-07-22 20页
项目工程成本管理探讨
2023-08-02 6页
消防维保记录表
2023-03-10 11页